Operating in a dynamic marine environment with changing currents and visibility, it can be challenging to maintain the precision needed for photogrammetry. In this mission, the Boxfish AUV’s efficiency in collecting high-resolution underwater data for coastal applications is highlighted.
Mission Overview
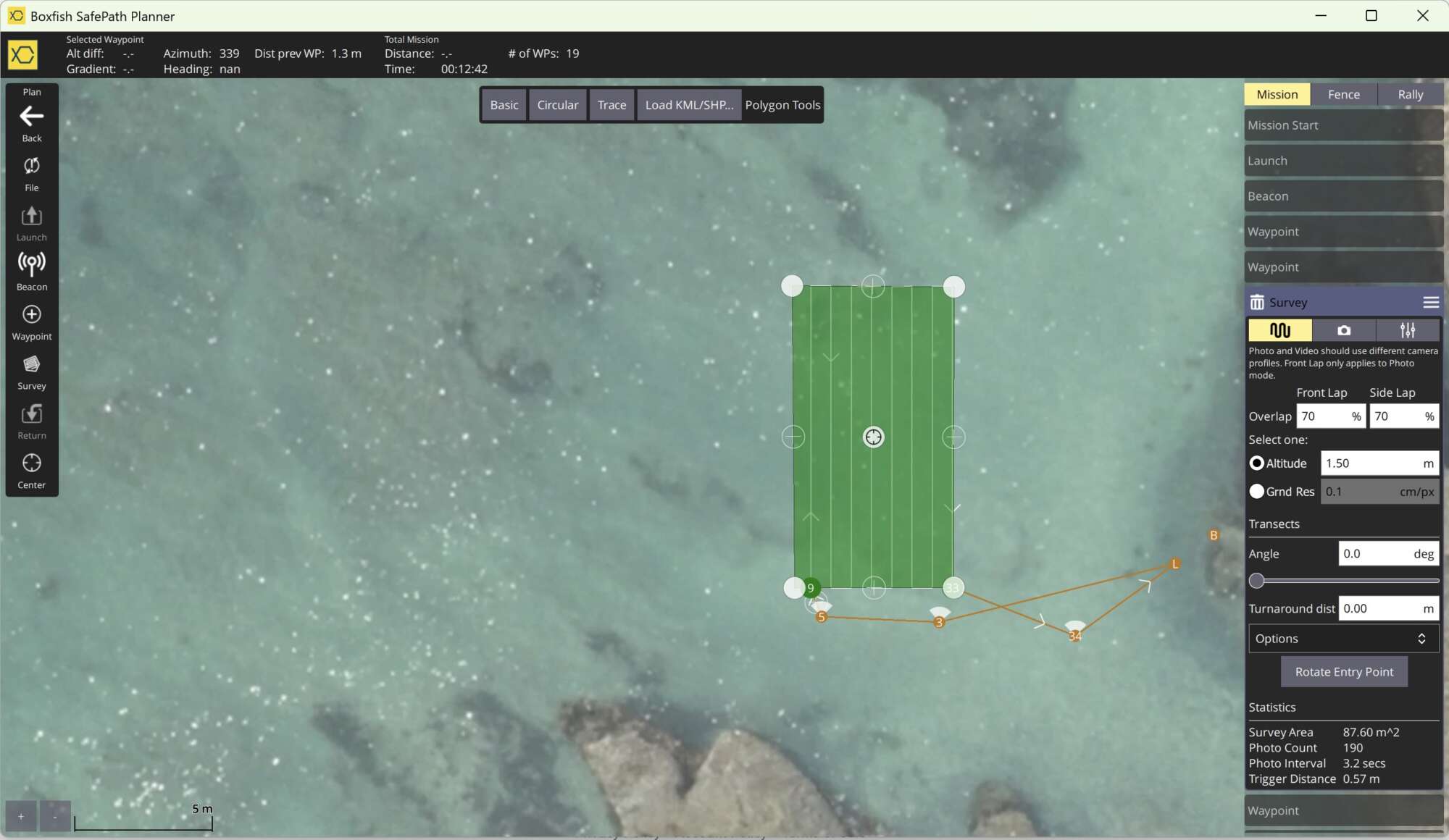
Using Boxfish Robotics Safepath mission planning software, we programmed the AUV to perform a 88 sqm grid survey at an altitude of 1.5 m, travelling at a speed of 0.3 m/s.
Screenshot
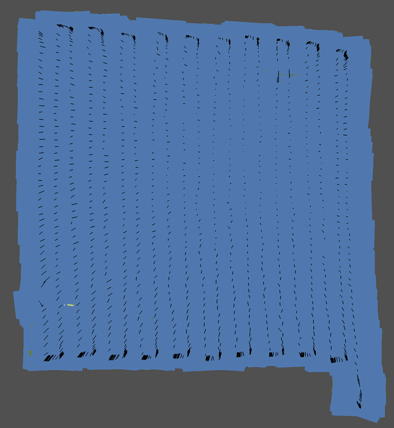
The entire mission was completed in a single 14 min run, producing:
A high-resolution 3D model of the seafloor
Efficient coverage with dense image overlap
Robust navigation and data capture in coastal conditions
Scientific Value of the Mission
This autonomous AUV coastal survey demonstrates the Boxfish AUV’s ability to:
Execute surveys with precision and reliability
Operate efficiently in environments with currents and visibility changes
Produce data suitable for scientific-grade 3D reconstruction
Applications include:
Coastal habitat mapping
Marine restoration projects
Baseline surveys for conservation
Towards Greater Impact
With efficiency proven in both freshwater and coastal environments, the next validation steps will focus on collaborative projects. Stay tuned as we continue to expand the envelope of autonomous underwater exploration.