Ongoing harbour health monitoring and environmental compliance in the Rangitoto Channel, within the wider operational environment of the Port of Auckland (Auckland, NZ), requires repeatable seabed video transects with sufficient image quality and positional accuracy to support environmental assessment and long-term comparison. Traditional approaches, including diver surveys, towed camera systems, and tethered ROVs, can struggle to deliver consistent altitude, lighting, and spatial repeatability, particularly in currents.
In response to these constraints, the Port of Auckland Environmental Team conducted an autonomous transect survey in the Rangitoto Channel to evaluate whether fully autonomous data collection could enhance visual consistency, positional accuracy, and operational efficiency.
Mission Planning and Execution
Seabed transects were executed using a hovering Boxfish AUV, programmed to autonomously navigate between predefined waypoints across the Rangitoto Channel. The mission was planned in advance and executed without tether or piloting, relying on onboard navigation.
The AUV was launched and recovered from a small vessel by a two-person team. Once deployed, the vehicle maintained a consistent survey altitude, pitch and speed throughout the transect, collecting continuous video and positional data without operator intervention. The mission was designed to support a repeatable workflow suitable for follow-up surveys.

Data Quality and Visual Outcomes
The resulting transect produced high-quality seabed video characterised by stable framing, even illumination, and sharp individual frames. Maintaining a constant altitude relative to the seabed resulted in uniform scale and perspective across the entire transect, reducing variability commonly observed in towed camera footage where altitude and camera angle fluctuate in response to vessel motion and current.
Even lighting across the survey significantly improved interpretability of seabed features, while frame sharpness enabled confident visual assessment at both video and still-image levels. Individual frames extracted from the video were suitable for detailed review and documentation, supporting both qualitative and quantitative interpretation.
Positional Accuracy and Interpretation
With the Boxfish AUV, latitude and longitude data were logged continuously throughout the mission at one-second intervals. This provided a direct spatial reference for the collected imagery. The system also uses RTK GPS, providing improved absolute positional accuracy and supporting repeatable transect surveys over time.
The Boxfish AUV produced video at a very consistent altitude and was able to precisely followed the planned transect paths, which is difficult to achieve with normal tethered ROV (without GPS) or towed camera systems. This significantly improved the interpretation of seabed features and supports consistent spatial comparison along permanent transects.
Paul Kennedy, Environmental Consultant
Optional on-screen captions can be enabled or disabled using VLC player to display mission and positional metadata, allowing the same dataset to be used flexibly across technical review, internal analysis, and external reporting contexts. This capability supports transparency and traceability without compromising visual clarity when captions are not required.
Operational Implications
This transect work in the Rangitoto Chanel demonstrates that autonomous surveys can deliver data quality and repeatability that meet the expectations of environmental monitoring programs while simplifying field operations. The ability to deploy and recover the system from a small vessel with a minimal crew reduces logistical complexity and lowers the barrier to conducting surveys more frequently.
For organisations managing multi-year monitoring obligations, this approach supports consistent, comparable datasets over time, reduces reliance on specialist vessels or contractors, and enables in-house teams to retain greater control over survey timing, execution, and data quality. The Rangitoto Channel transect provides a practical example of how autonomous AUVs can be integrated into routine environmental monitoring workflows.
The Boxfish AUV was designed to optimise seabed monitoring by reducing operational variability and maximising data consistency. By using fully autonomous transects environmental teams can focus on data interpretation rather than vehicle control.
Craig Anderson, Boxfish Co-founder
Survey work like this is carried out by a variety of organisations such as ports and Councils in relation to dredging, discharges and construction activities. Environmental teams interested in applying autonomous AUV transect surveys to their own monitoring programmes are welcome to contact Boxfish team using contact form to discuss their application and request additional technical details.
-
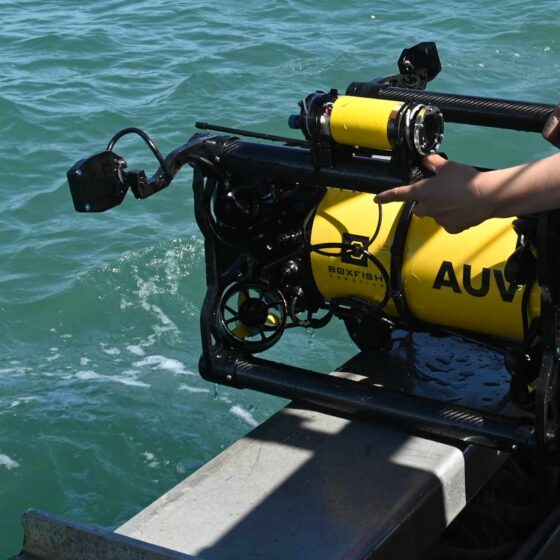 Boxfish AUV prepared for an autonomous transect survey prior to deployment.
Boxfish AUV prepared for an autonomous transect survey prior to deployment.
-
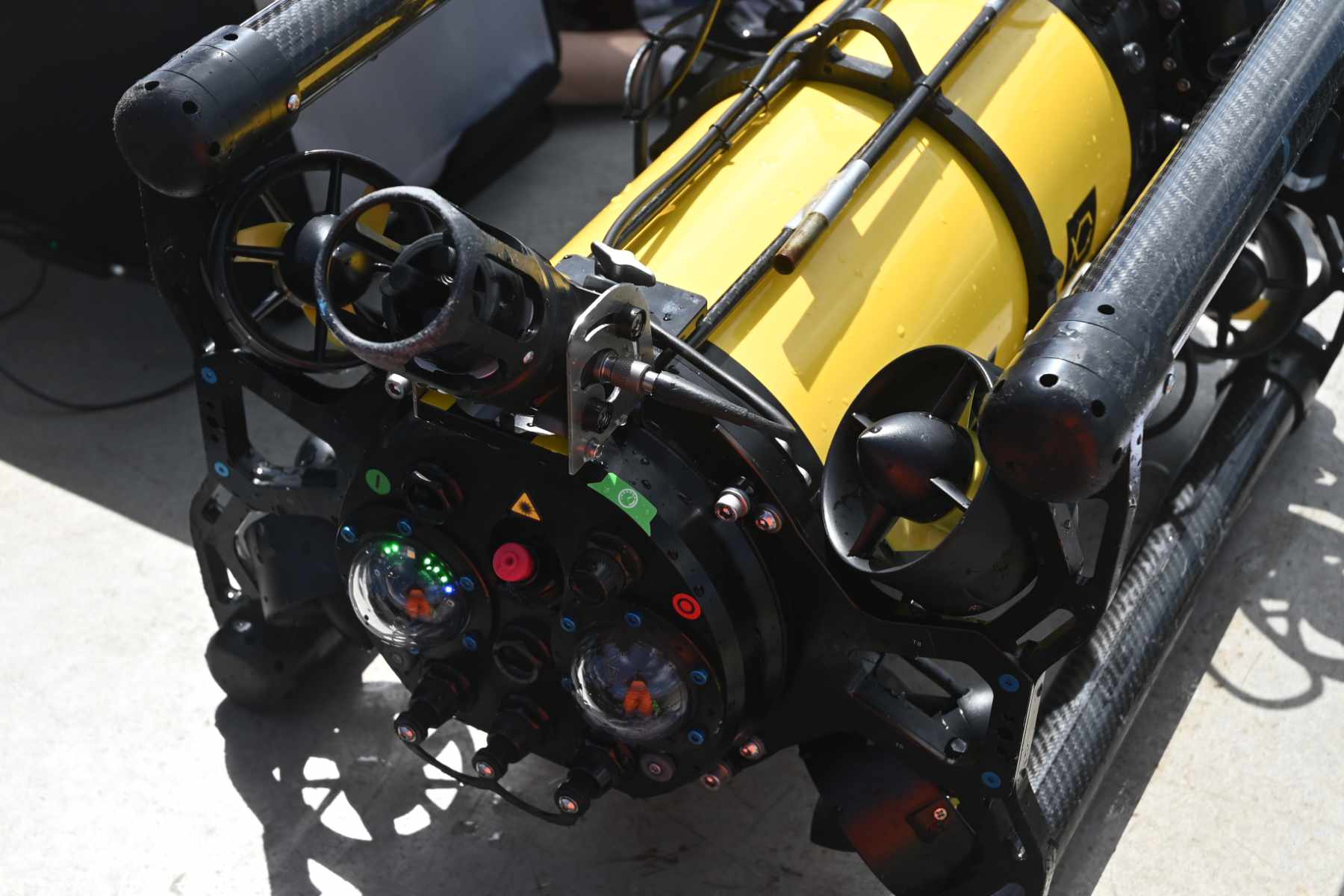
 Integrated USBL positioning sensor on the Boxfish AUV supporting accurate navigation and positioning data during autonomous transect surveys.
Integrated USBL positioning sensor on the Boxfish AUV supporting accurate navigation and positioning data during autonomous transect surveys.
-
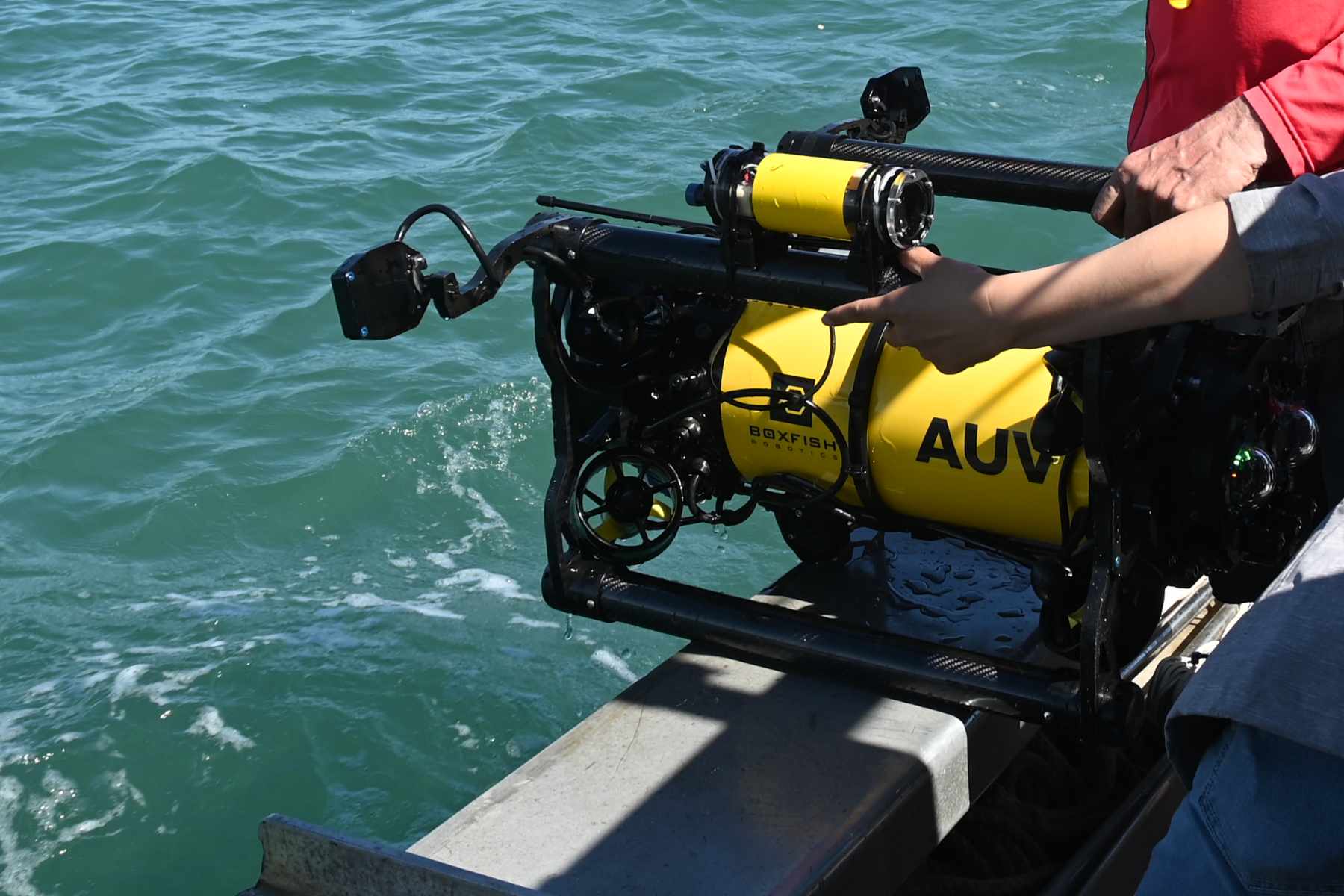
 Deployment of the Boxfish AUV from a small vessel for a fully autonomous transect survey, requiring minimal crew and simplified field operations.
Deployment of the Boxfish AUV from a small vessel for a fully autonomous transect survey, requiring minimal crew and simplified field operations.
-
 Boxfish AUV in the water at the start of an autonomous transect survey, completing surface positioning before commencing subsea navigation.
Boxfish AUV in the water at the start of an autonomous transect survey, completing surface positioning before commencing subsea navigation.
-
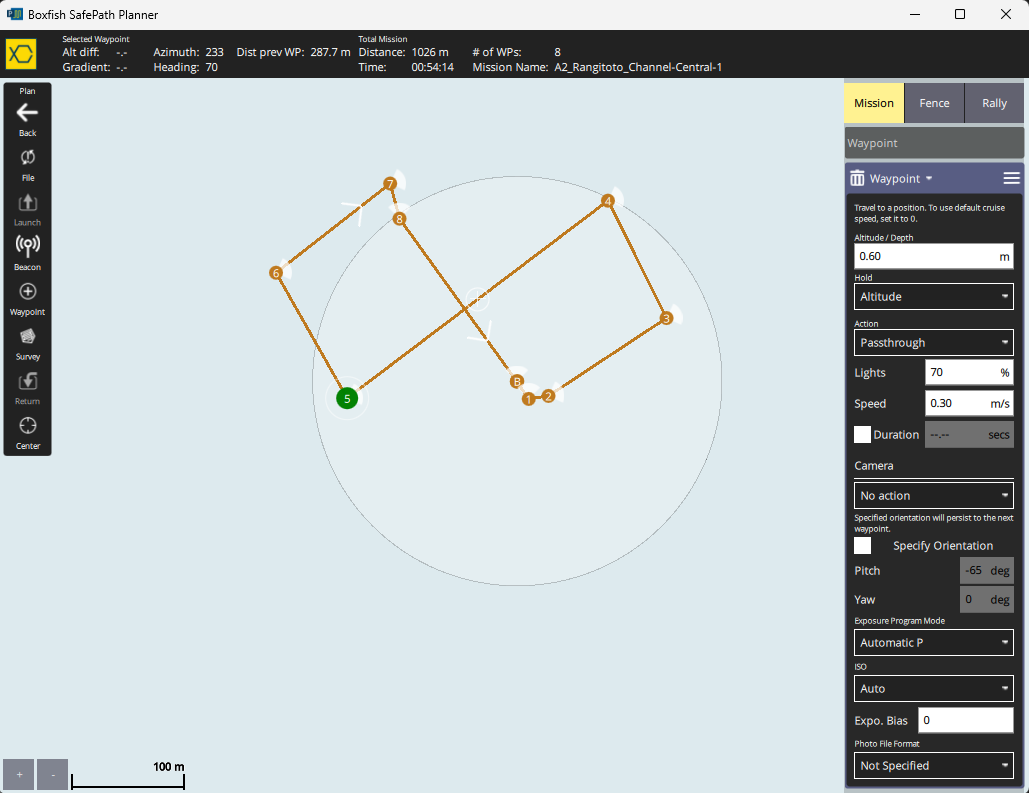
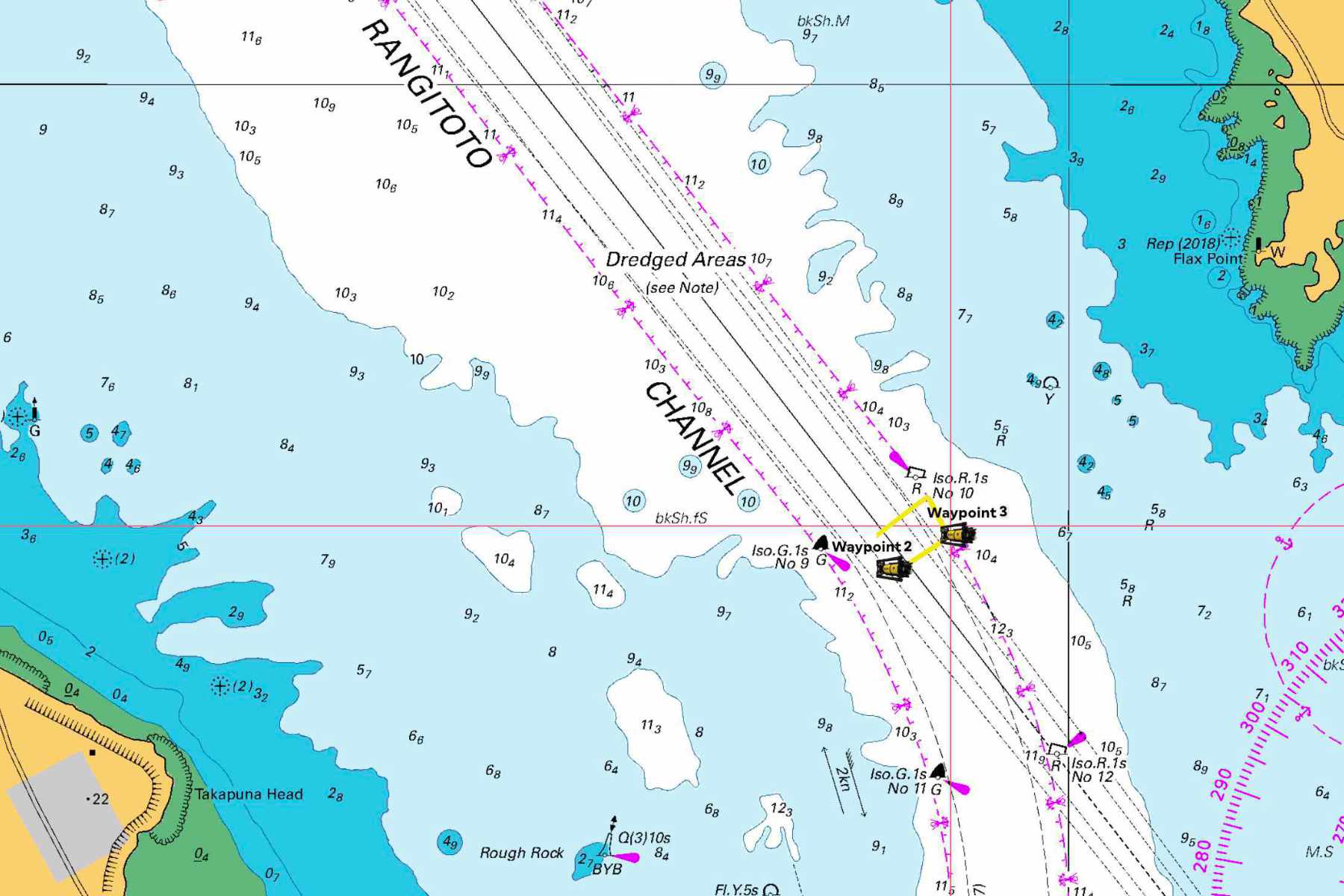
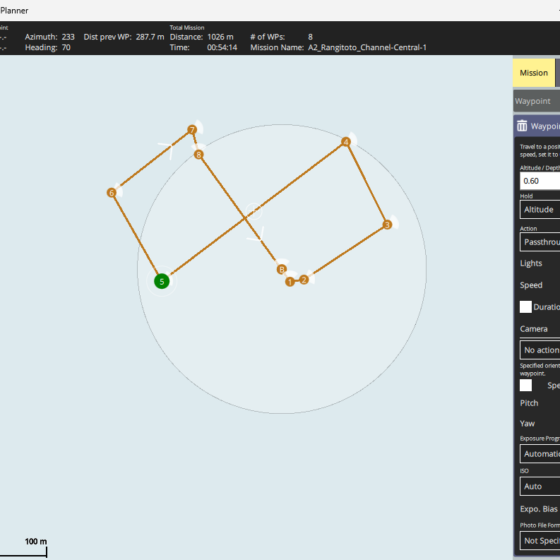 Autonomous AUV transect mission plan showing predefined waypoints and survey path used to execute a number of transects.
Autonomous AUV transect mission plan showing predefined waypoints and survey path used to execute a number of transects.
-
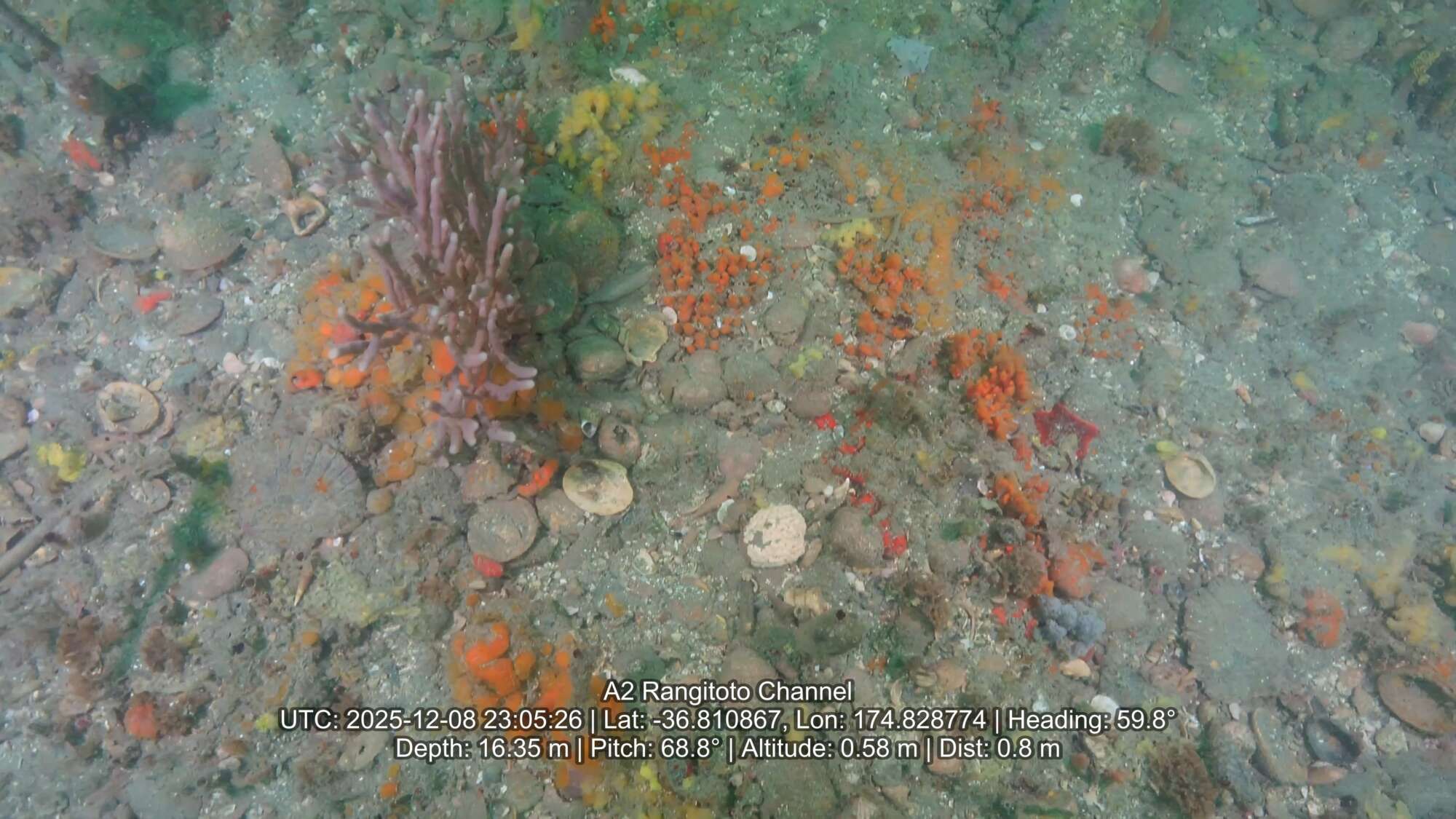
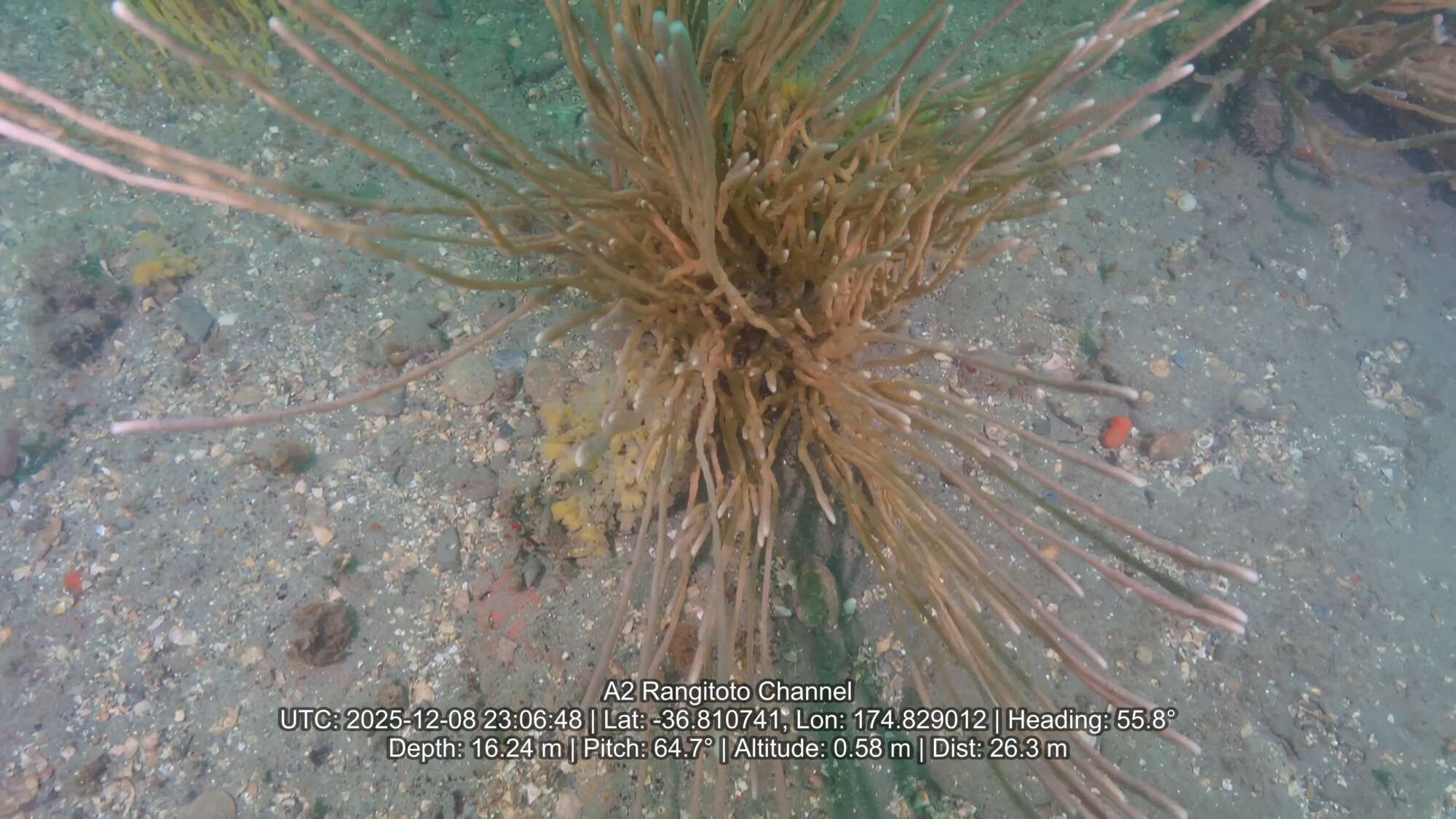
 Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.
Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.
-
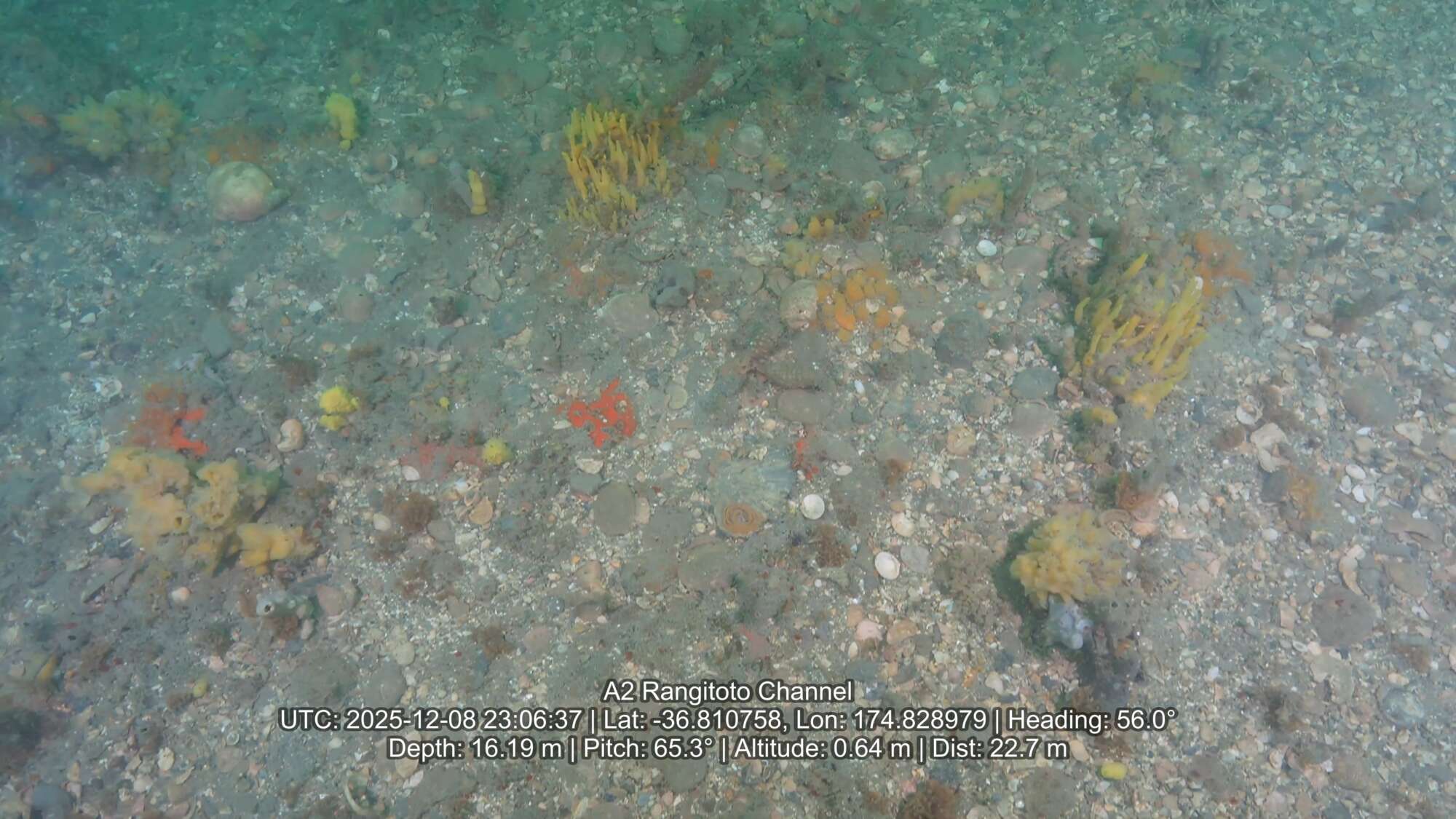
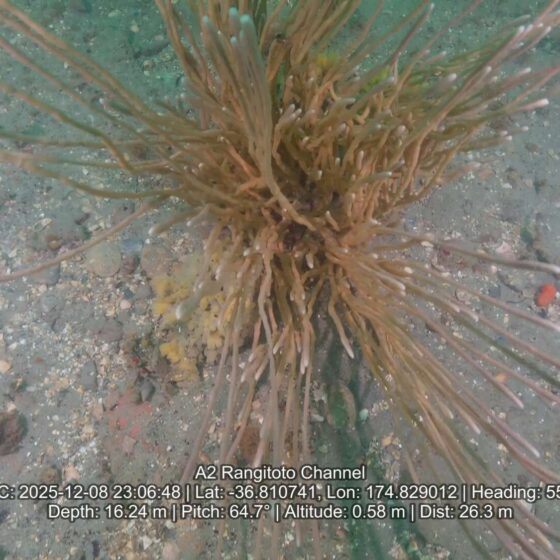 Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.
Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.
-
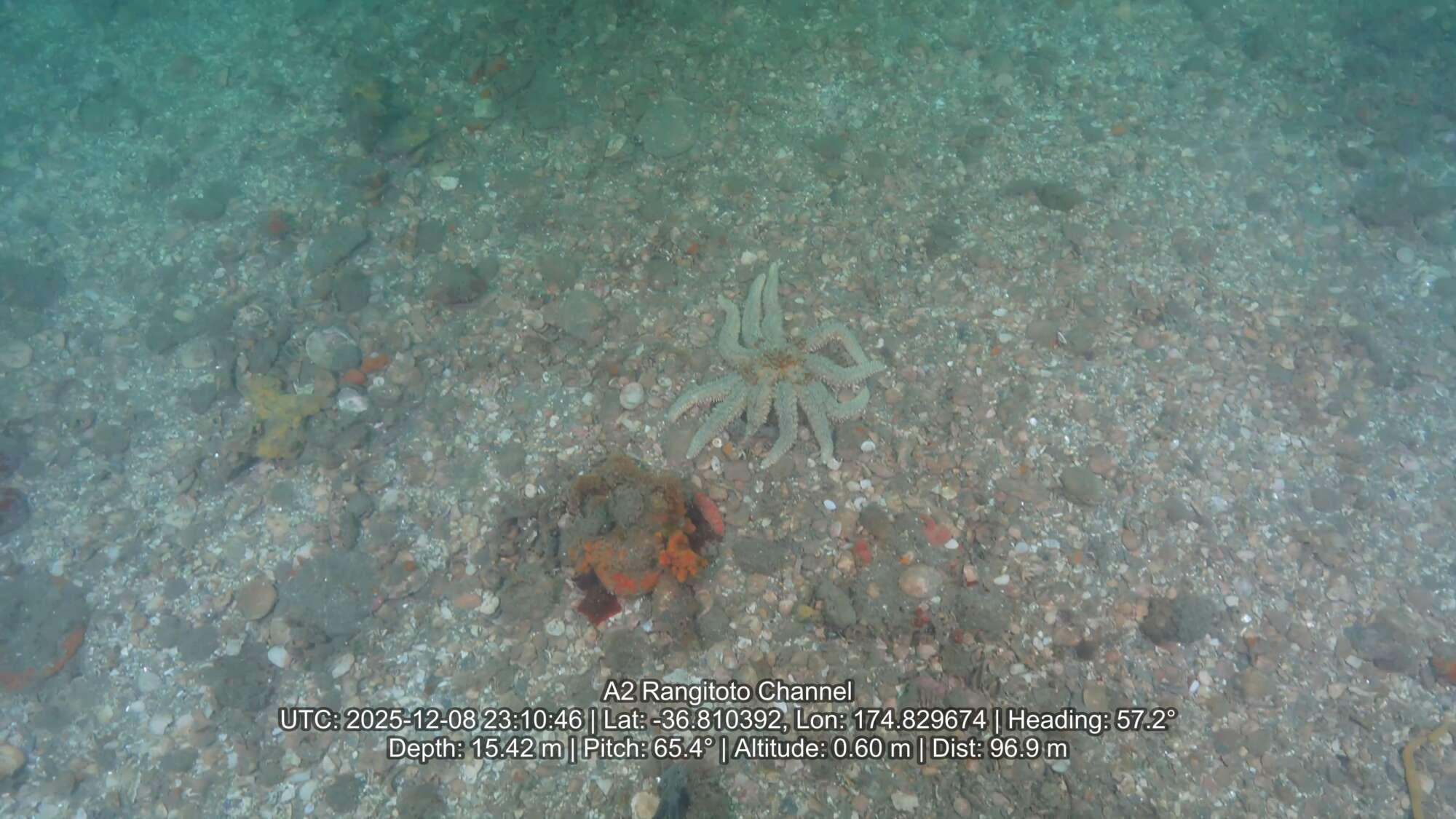
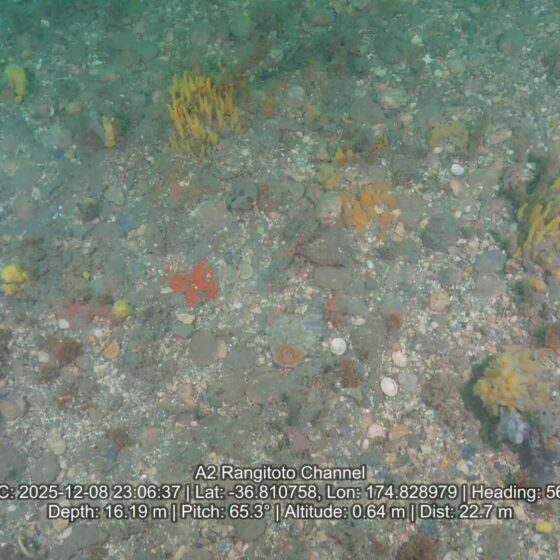 Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.
Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.
-
 Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.
Seabed imagery collected during an autonomous Boxfish AUV transect survey in the Rangitoto Channel.