Underwater photogrammetry is widely used for seabed mapping, environmental monitoring, and infrastructure inspection. However, producing consistent, high‑quality 3D reconstructions underwater remains challenging, particularly when surveys need to be repeated over time. While both remotely operated vehicles (ROVs) and autonomous underwater vehicles (AUVs) can collect suitable imagery, maintaining the accuracy of overlapping passes required for reliable, quality photogrammetry is not always straightforward.
What Underwater Photogrammetry Needs to Work Well
Reliable underwater photogrammetry depends on both consistent survey geometry and image quality. Images must be collected at a stable altitude, with predictable spacing and sufficient forward and side overlap, while maintaining enough sharpness and texture for reliable feature matching during reconstruction.
In practice, this means survey lines should be flown as smooth, even, parallel transects while maintaining a stable speed and heading. Stable vehicle motion helps minimise changes in image scale, viewing angle, and motion blur between frames, improving reconstruction consistency.
These factors become particularly important underwater, where turbidity, backscatter, current, and changing illumination already reduce image quality compared with terrestrial photogrammetry workflows.
Challenges of ROV-Based Photogrammetry
ROVs can produce high-quality imagery, however, maintaining consistent survey geometry with a tethered platform can be challenging. Vehicle motion is continuously influenced by tether drag, current, and surface vessel movement, requiring ongoing pilot correction to maintain altitude, heading, and line spacing. Even with experienced pilots, small variations in position and orientation are difficult to avoid. Maintaining accurate line spacing over longer distances is particularly challenging.
These variations directly impact photogrammetry outcomes. Changes in altitude affect ground sampling distance, while inconsistencies in heading, speed, and overlap reduce alignment quality between frames and survey lines. As a result, datasets can become less uniform and require more careful processing to achieve reliable reconstruction.
Lighting consistency can also be harder to maintain during manual flight, particularly over uneven terrain where vehicle attitude is constantly changing. This further introduces variability between images, especially across longer survey lines.
ROV photogrammetry often relies heavily on pilot skill and is generally better suited to targeted inspections and smaller reconstruction areas rather than highly repeatable large-area surveys.
Challenges of traditional AUV-Based Photogrammetry
One of the key challenges when using conventional torpedo‑shaped AUVs for photogrammetry is how survey patterns are executed in practice. These vehicles are well suited to long, straight transects, flying quite high above the reef to avoid quickly changing reef topology. However, due to their forward‑motion design and limited turning radius, they must travel beyond the area of interest before turning and beginning the next line. In addition, they cannot maintain a constant altitude when topology changes quickly.
As a result, a significant portion of mission time is spent surveying areas outside the target grid. This leads to longer data collection times and generates large volumes of non‑essential imagery that must later be filtered during post‑processing. In addition, the relatively high survey altitude results in less image detail and is unsuitable if visibility is not ideal. While effective for covering broad areas, this approach reduces overall efficiency and can make reconstruction workflows more time‑consuming and impractical when the objective is focused, high‑resolution mapping of a defined site.
Hovering AUVs Photogrammetry
Hovering AUVs, like the Boxfish AUV, are particularly well suited to photogrammetry because they are designed to maintain stable and repeatable survey geometry autonomously.
Operating without a tether removes a major external disturbance source and allows the vehicle to maintain a consistent altitude, heading, and speed relative to the seabed throughout the mission. Survey lines can be pre-planned as evenly spaced parallel transects, producing predictable overlap and more uniform image coverage across the survey area.
The collected imagery typically exhibits more consistent image scale, smoother transitions between frames, and reduced motion variability during acquisition. Stable vehicle behaviour also supports more consistent lighting geometry, improving texture continuity between images and supporting more reliable feature matching during reconstruction.
Combined with synchronised navigation and imaging data, this creates datasets that are generally easier to align, reconstruct, geo-reference, and repeat over time.
Boxfish AUV Built Around Photogrammetry Fundamentals
The Boxfish AUV is a hovering AUV with 6DOF that designed specifically for close‑range seabed imaging and photogrammetry.
The vehicle uses active stabilisation to maintain a consistent altitude, heading, and speed while autonomously following pre‑planned survey lines. Its navigation system combines seabed‑referenced DVL with USBL updates, enabling accurate and repeatable positioning throughout the mission.
Missions are executed as smooth, evenly spaced transects designed to maintain predictable overlap across the survey area. This controlled survey geometry supports consistent image scale and improves the reliability of reconstruction, particularly in environments affected by current or reduced visibility.
With synchronised, geo‑referenced imagery and navigation data, the system is designed to support efficient, repeatable photogrammetry workflows for scientific and industrial applications.
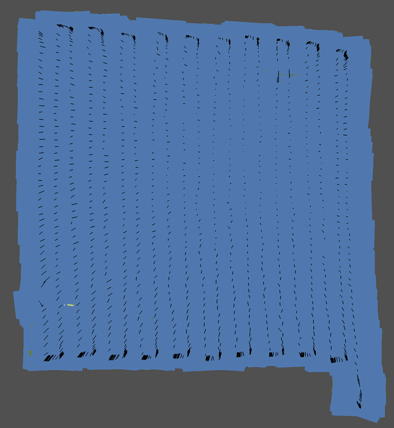
Boxfish AUV during its deployment.Survey lines showing Boxfish AUV image capture positions, with evenly spaced transects supporting consistent overlap and reconstruction quality.