Transect video surveys are a fundamental tool in marine monitoring, supporting habitat mapping, biological assessments, and long‑term environmental studies. Traditionally, these surveys are conducted using divers, remotely operated vehicles (ROVs), or towed and drop‑camera systems, each offering valuable capabilities, but also introducing constraints on consistency, coverage, and repeatability.
Recent autonomous transect missions using the Boxfish AUV demonstrate how autonomy can redefine what is possible for video‑based seabed surveys, delivering consistent, repeatable transect footage at scale.
Autonomous Transect Missions
When operating in autonomous tetherless mode, the Boxfish AUV executes pre‑planned transect lines without pilot intervention, maintaining a controlled altitude, speed, and heading throughout the mission. This results in stable, uniform video that is well suited for scientific analysis and comparison across sites.
Camera angle and altitude are defined before the mission. The AUV operator can review video during a short quality control mission at the start of field work. If required, mission parameters can be adjusted before the main survey is executed.
Autonomous execution removes pilot induced variability and ensures consistent survey geometry, even across long transects or multiple survey runs. Each mission is flown exactly as planned, producing datasets that are inherently comparable over time.
What Autonomy Enables
Autonomy allows the vehicle to complete multiple transect lines in a single mission. This capability increases daily survey coverage and reduces operational complexity.
Without a tether or continuous pilot control, the Boxfish AUV operates efficiently in moderate currents and challenging conditions. These conditions often restrict diver‑based or ROV surveys.
Just as importantly, autonomous transects can be repeated with a high level of consistency. Identical missions can be re‑run months or years apart. This consistency supports time‑series monitoring and change detection, which are core requirements for many scientific and regulatory programmes.
Repeatable Synchronised Survey Data
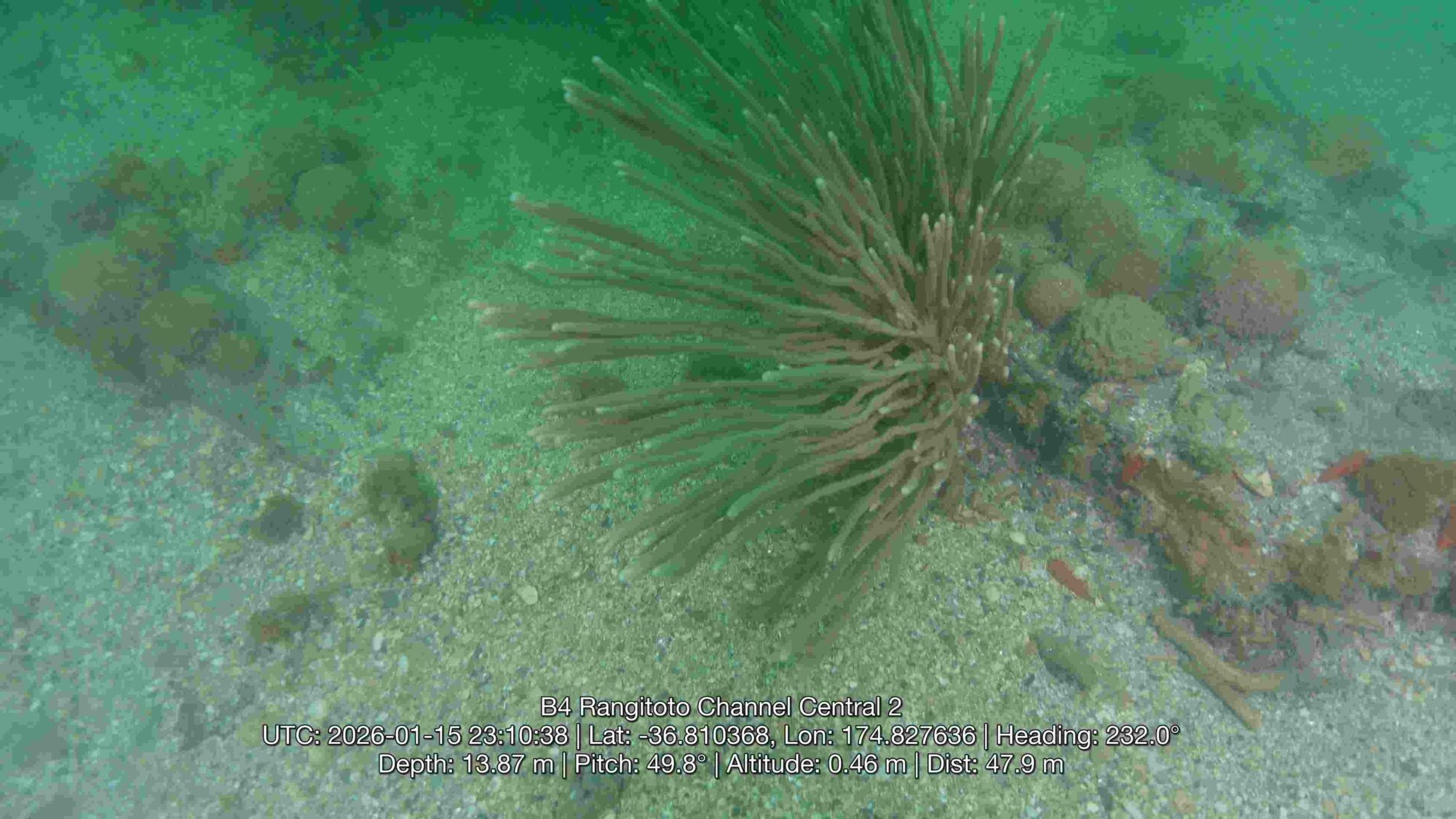
Reliable transect surveys depend on more than just high‑quality video. Boxfish AUVs synchronise video, navigation, and sensor data with high precision. This synchronisation ensures accurate spatial and temporal alignment for each video frame.
Pic. 1. Seabed imagery with georeferened data collected during an autonomous Boxfish AUV transect survey.
This integrated dataset can be overlaid directly onto video or exported into GIS platforms and other analysis software for visualisation, interpretation, and reporting. This workflow improves efficiency and strengthens confidence in spatial accuracy, which is critical for repeat surveys and monitoring programmes.
Comparison with Traditional Survey Methods
Diver‑Based Surveys
Diver transects are widely used in shallow water but are restricted by depth limits, bottom time, and safety considerations. Maintaining consistent altitude, speed, and transect length across dives is challenging, particularly over larger areas.
Boxfish AUV autonomy removes these constraints, enabling longer, more uniform transects while reducing operational risk and logistical overhead.
ROV‑Based Surveys
ROVs provide real‑time control and flexibility, but manual piloting and tether management can limit consistency along extended transects. Pilot workload and environmental conditions can introduce variability into video datasets.
Autonomous AUV transects avoid tether‑related limitations. They deliver repeatable survey lines with reduced operator input. This makes them well suited to standardised transect surveys.
Towed and Drop‑Camera Systems
Towed and drop cameras are effective for broad reconnaissance but typically offer limited control over altitude and trajectory, particularly over uneven seabed. Vessel motion and cable geometry can reduce spatial accuracy and video consistency.
By operating independently of the surface, the Boxfish AUV maintains precise positioning and altitude. This capability delivers cleaner and more spatially reliable transect footage.
A New Standard for Transect Video Surveys
Autonomous transect captured with Boxfish AUV combines repeatable mission execution with precisely synchronised data, producing video surveys that are consistent, scalable, and scientifically robust.
By addressing the limitations of diver‑based surveys, ROVs, and towed or drop‑camera systems, Boxfish autonomy sets a new standard for underwater transect surveys. That standard focuses on repeatability, data quality, and long‑term value.