Boxfish Robotics R&D team has taken another big step in advancing the autonomous capabilities of the Boxfish AUV. As part of our phased validation approach, we recently conducted a successful mission in Lake Pupuke, New Zealand, a freshwater crater lake ideal for controlled demonstrations.
Mission Overview
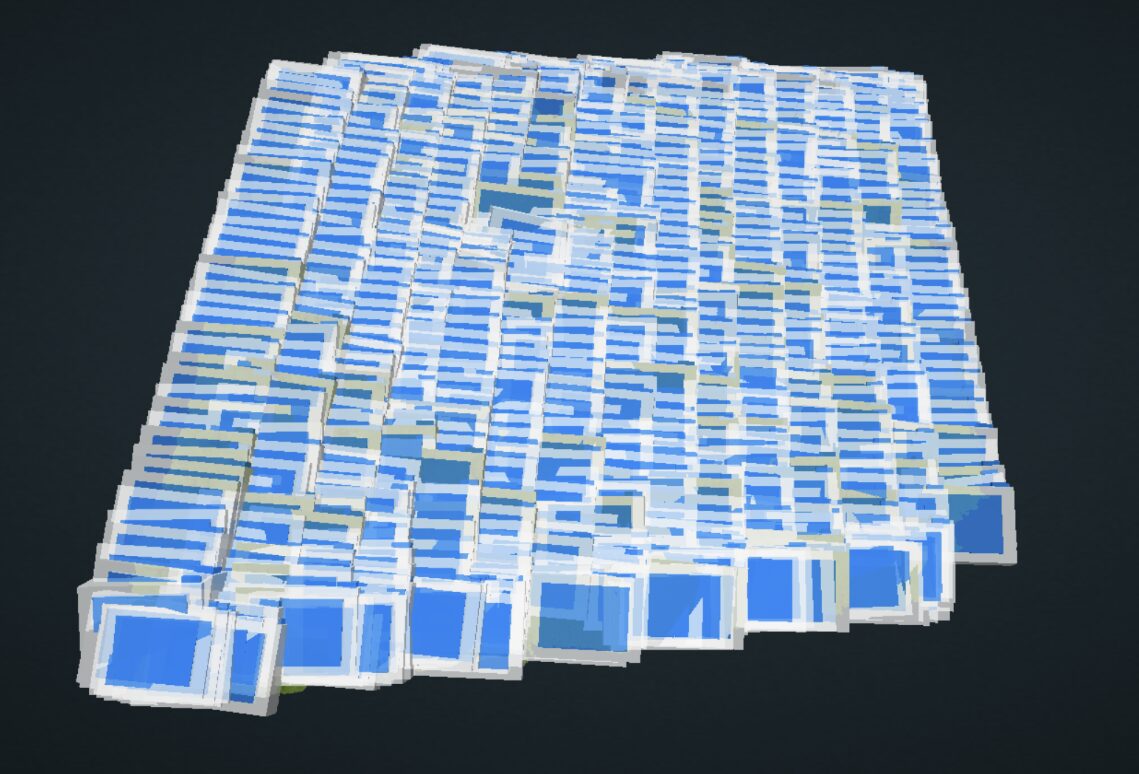
Using Boxfish Mission Planning Software Safepath, we programmed the AUV to perform a 15 × 15 m grid survey at an altitude of 1.7 m, travelling at a speed of 0.3 m/s. The result? A highly detailed 3D model of the lakebed, created from over 800 overlapping images captured in a single 26 minute run.
This tightly packed visualisation of image overlap illustrates the precision and efficiency of the coverage is an essential foundation for reliable photogrammetry, habitat analysis, and environmental monitoring.
800 overlapping images created by Boxfish AUV during its lake mission
Scientific Value of the Mission
This mission demonstrates the AUV’s ability to autonomously:
Navigate pre-planned paths with high spatial accuracy
Maintain stable altitude and speed throughout the mission
Capture data suitable for scientific-grade 3D reconstruction
For researchers, environmental agencies, and marine consultants, this test shows the potential of Boxfish AUV for:
Lake and shallow water surveys
Baseline habitat mapping
Monitoring change over time
Towards Greater Impact
The next phase of our programme brings the AUV into coastal and open ocean environments, where we will showcase performance in more dynamic conditions and larger-scale missions. Later this year, we plan to collaborate with partners on real-world applications, including coral reef surveys.
Stay tuned as we expand the envelope of autonomous underwater exploration.