




Software designed for real‑world autonomous surveys
The Boxfish AUV Software Suite is designed to support autonomous underwater surveys conducted by the Boxfish AUV or ARV-i through a clear three‑step workflow. Each application focuses on a specific task, making the system easier to use, easier to validate, and easier to integrate into scientific and professional survey workflows.
The Boxfish AUV Unified Software Suite consists of three applications:
- SafePath Mission Planner for mission definition
- Boxfish Commander for mission execution and supervision
- Boxfish Live Tracker for spatial visualisation
By separating planning, operation, and review into three focused tools, the Boxfish AUV Software Suite avoids unnecessary complexity while supporting the full survey lifecycle. Mission planning and operations do not require Internet access, therefore are suitable for even remote field deployments. The unified software applications communicate with each other to ensure seamless workflow with the interface of each is intentionally simple and designed with deployment from small boats in mind.
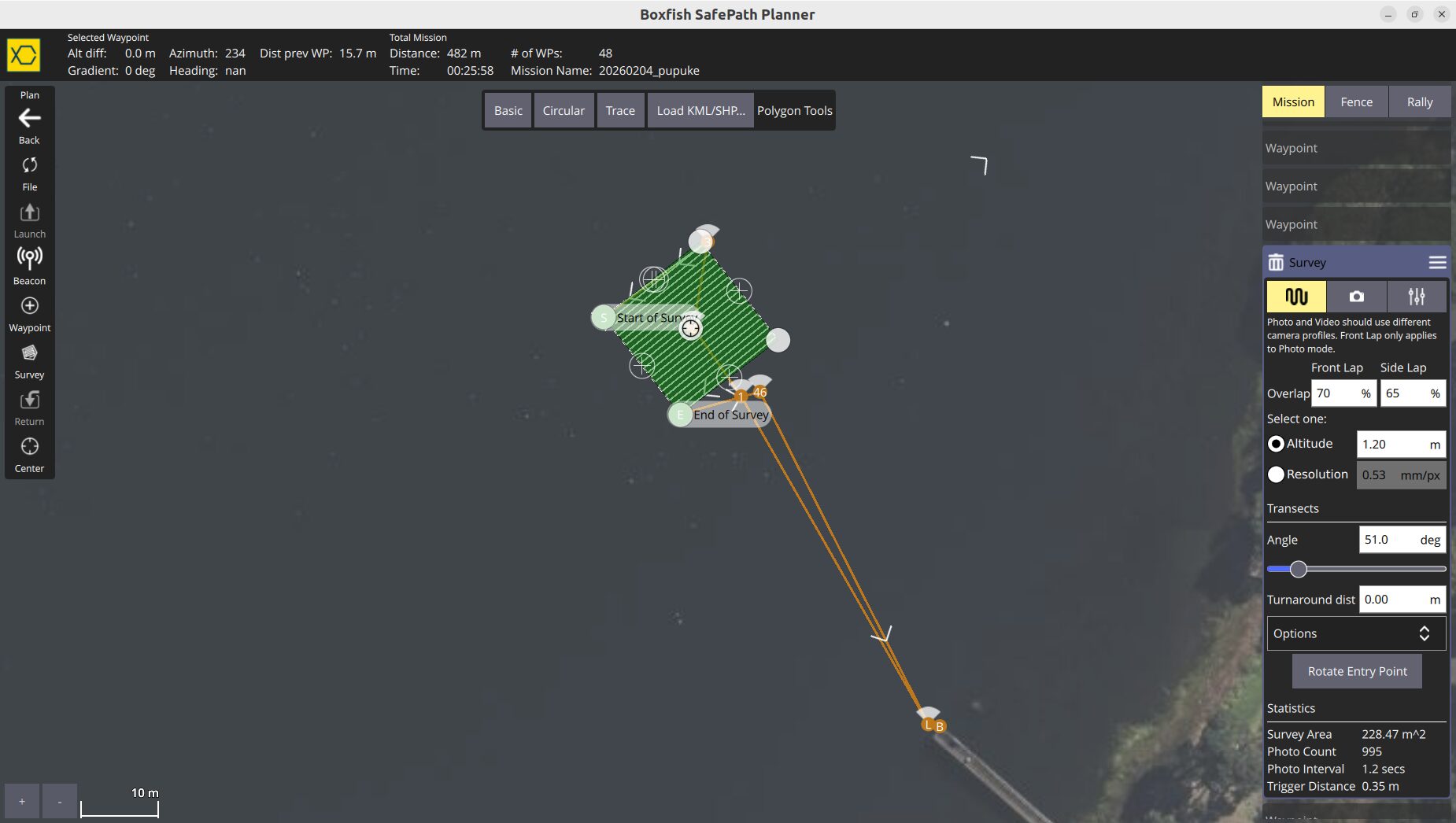
STEP 1 Define the survey with SafePath Mission Planner
SafePath Mission Planner is used prior to deployment to define the survey geometry and data‑collection parameters. Missions are created using a map‑based interface where users specify waypoints, transects, or grid patterns and set survey parameters such as speed, altitude, and camera or/and environmental sensors behaviour.
The software is designed to be usable by teams without requiring specialist robotics or programming skills. Missions can be saved and reused, supporting repeatable surveys and consistent data collection over time.
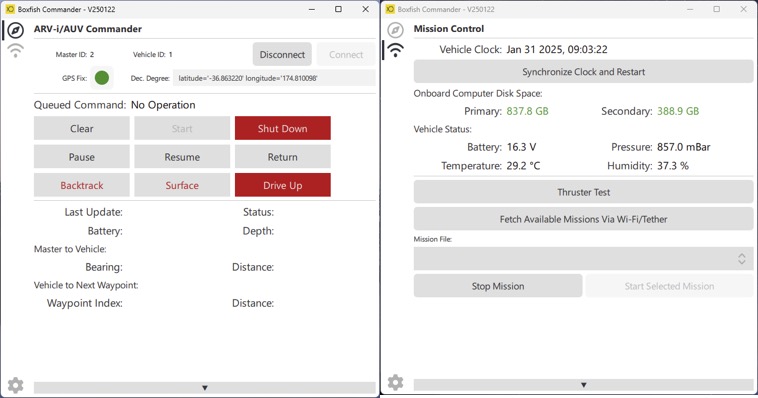
STEP 2 Run the survey with Boxfish Commander
Boxfish Commander is used during deployment to initiate and supervise the autonomous mission. It provides live telemetry and system status information, allowing operators to confirm that the vehicle is operating as expected.
Commander enables mission start, monitoring, and interruption if required.
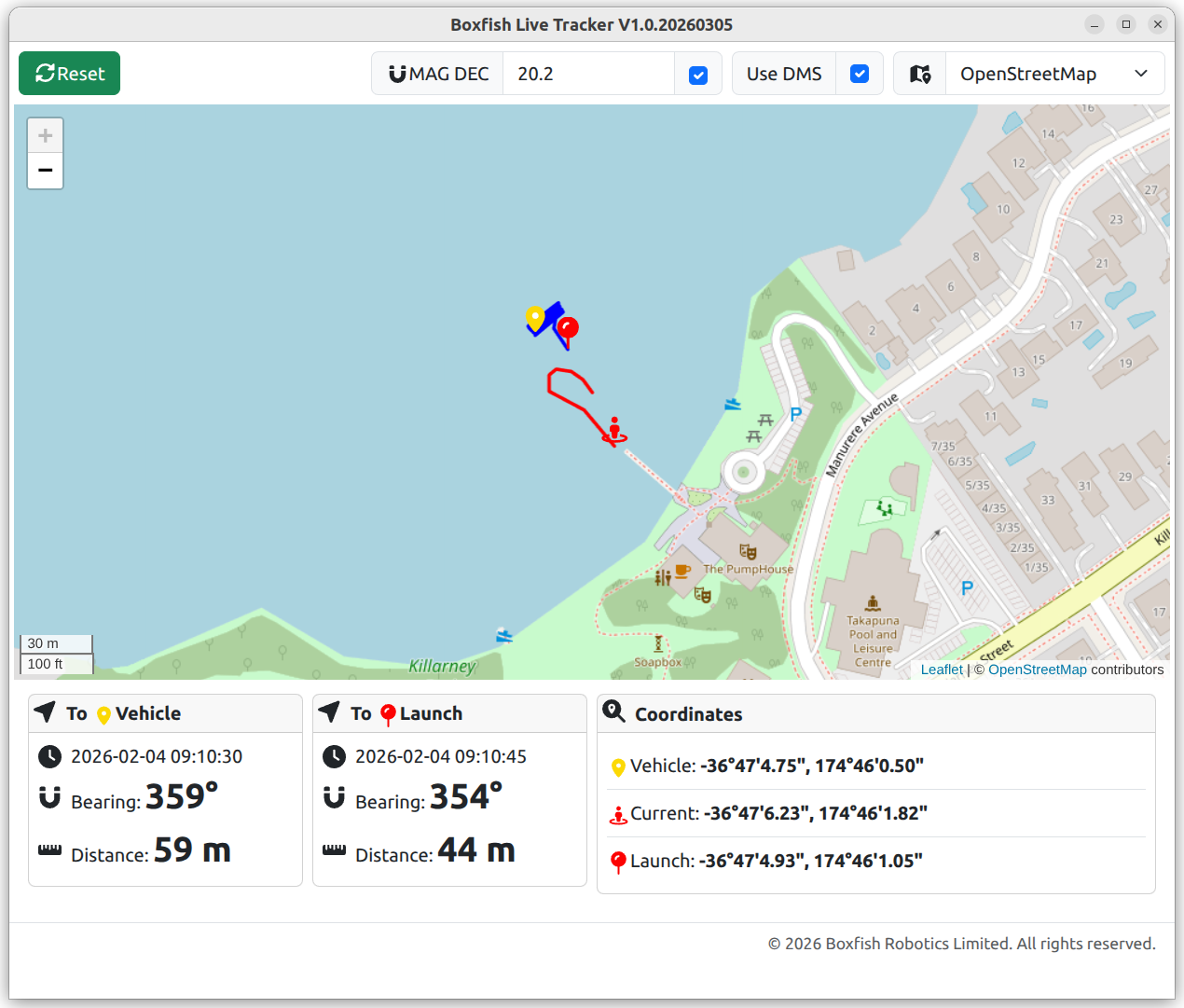
STEP 3 Monitor the mission with Boxfish Live Tracker
Boxfish Live Tracker is used to visualise the spatial context of the mission. It displays the AUV position and reference points on a map and supports playback of completed missions from log files.
This allows users to review survey coverage, confirm vehicle paths, and relate collected data to location, which is particularly important for reporting, analysis, and long‑term monitoring studies.
Further technical details are available in the supporting documentation or by contacting Boxfish Robotics for application specific guidance.