Obstacle avoidance is one of the defining capabilities of a hovering AUVs and autonomous ROVs. Without it, autonomy is limited: vehicles must fly higher, surveys become conservative, and missions rely heavily on prior site knowledge or active supervision.
In real marine environments, obstacles are unavoidable. Infrastructure, natural relief, moorings, debris and biological structures often appear where no prior data exists. For an AUV to operate safely and productively, it must be able to detect obstacles, assess risk, and respond in real time without compromising the survey objectives.
This is why obstacle avoidance is treated at Boxfish as a core component of autonomous operation.
Two Complementary Boxfish Approaches to Obstacle Avoidance
Hovering Boxfish AUV uses a combination of DVL‑based awareness and stereo camera‑based perception to support obstacle avoidance across a range of environments and operating conditions.
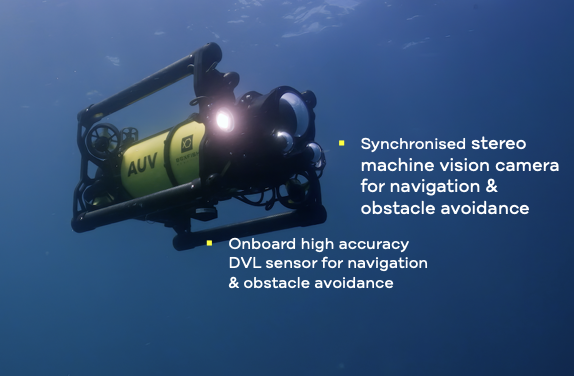
DVL‑based obstacle awareness allows the vehicle to maintain precise altitude and terrain following relative to the seabed. By continuously measuring distance to the bottom, the AUV can detect rising terrain, walls, rocks or unexpected features and adjusts altitude to avoid collision while preserving stable flight.
Stereo camera‑based obstacle detection complements this by identifying discrete objects in the vehicle’s forward field of view. This is particularly valuable for vertical or isolated structures—such as poles, cables, or infrastructure elements—that may not be well represented by seabed‑referenced sensing alone.
Together, these approaches enable the Boxfish AUV to respond intelligently to both continuous terrain changes and discrete obstacles.
Obstacle Avoidance in the Context of Autonomous Data Collection
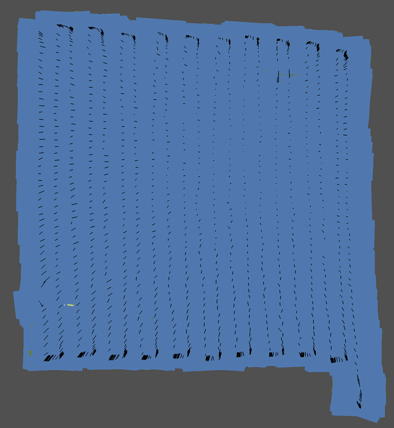
The Boxfish AUV’s design philosophy prioritise repeatable, geo‑referenced paths at low altitude to support imaging, mapping, and environmental monitoring. In this context, obstacle avoidance must do more than simply prevent collisions. It must also preserve the intent and integrity of the survey. Rather than aborting missions or making large lateral detours, the Boxfish AUV prioritises controlled altitude adjustments wherever possible. This allows the vehicle to remain aligned with the planned transect while adapting to the environment in real time.
This approach helps maintain continuous spatial coverage, consistent image overlap and predictable survey geometry. All of which are critical for downstream analysis and long‑term monitoring programmes.
Example from a Real Survey
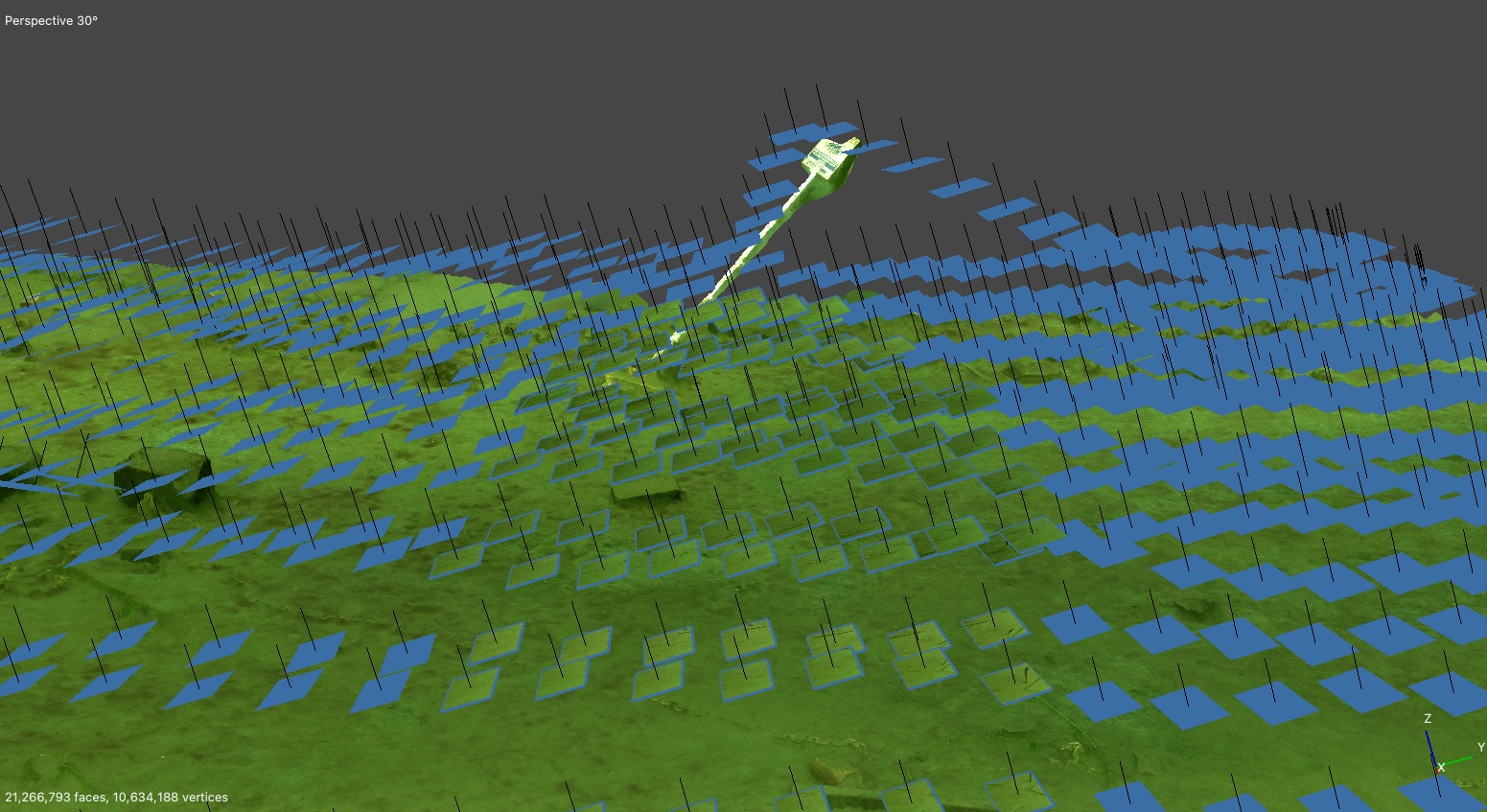
The image below provides a practical illustration of these principles in action. During an autonomous transect survey, the Boxfish AUV encounters a vertical submersed road sign directly in its planned path; the vehicle detects the obstacle and smoothly climbs over the structure. The transect continues with minimal disruption and data collection remains consistent across the area.
3D model of the lake bed showing the Boxfish AUV climbing over a vertical pole encountered during a grid survey.
Enabling Confident Autonomous Operations
Effective obstacle avoidance reduces operational risk, but its real value lies in enabling confidence in autonomous systems. When an AUV can be trusted to handle the unexpected, operators can plan more ambitious missions, fly closer to the seabed, and rely on consistent outcomes.
For applications such as environmental monitoring, seabed mapping, and infrastructure inspection, this capability directly supports:
Fewer aborted missions
Reduced operator intervention
More reliable and repeatable datasets
Obstacle avoidance is therefore not just about safety, it is essential to making AUVs practical, scalable tools for real‑world marine work.
The Boxfish AUV combines obstacle avoidance, precise
navigation, and transect‑optimised autonomy to support
high‑quality underwater surveys in complex environments.