Commercial tunnel and pipeline inspections in highly turbid water remain one of the most challenging offshore and inland tasks. Visibility is often close to zero, access is constrained, and diver entry is either unsafe or impossible.
This use case describes how New Zealand commercial diving company Deep Dive Division used their Boxfish ROV configured with sonar‑based sensing to assess a tunnel in zero visibility conditions. The project highlights how compact ROV systems combined with advanced sonar technologies can provide reliable inspection capability where traditional visual methods are no longer effective.

Tunnel Inspection Challenge
Deep Dive Division was tasked with inspecting a tunnel approximately 163 metres long. Prior to the inspection, very little was known about the internal condition of the structure. The team had no clear information about the tunnel geometry, potential bends, obstructions, or sediment build-up inside the passage.
Water clarity inside the tunnel was extremely poor, making conventional camera-based inspection ineffective beyond the entrance area. Due to the confined environment and unknown internal conditions, diver entry was considered unsuitable for the operation.
The inspection therefore required a solution capable of navigating and collecting usable data in complete darkness and near zero visibility.
Tunnel Inspection Method
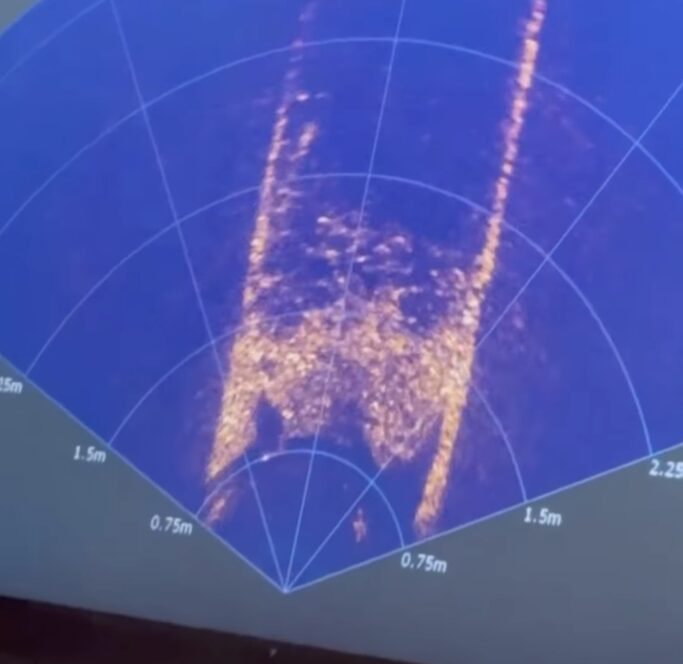
To operate effectively in these conditions, Deep Dive Division configured their Boxfish ROV with an imaging sonar system to support navigation and pilot situational awareness inside the tunnel. The imaging sonar allowed the pilot to identify tunnel walls, obstacles, and general structure layout in real time, enabling controlled vehicle movement despite the near zero visibility.
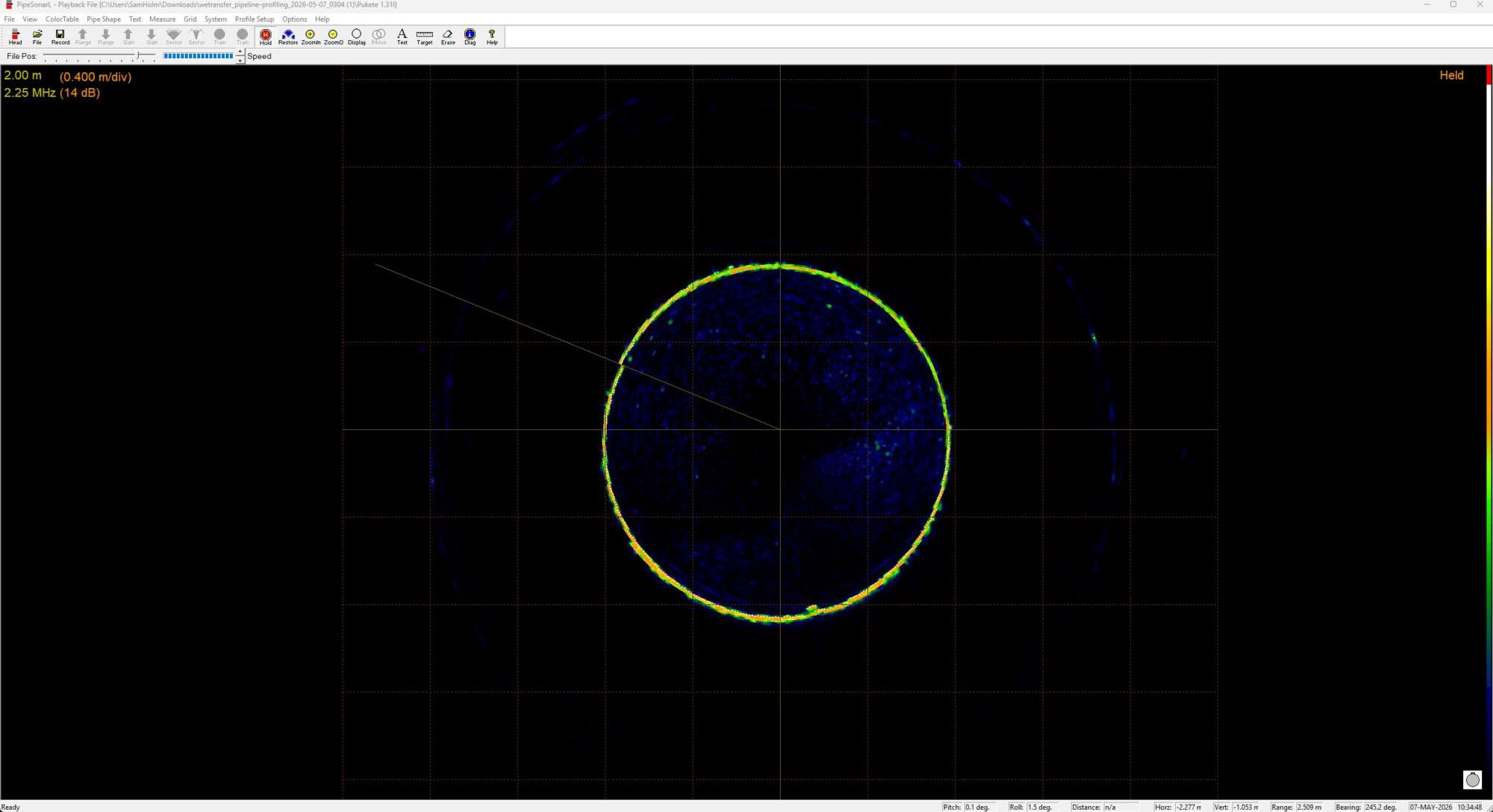
To further extend the inspection capability, the team upgraded the ROV with a pipe profiling sonar. Rather than generating conventional visual imagery, the profiling sonar captured cross-sectional and spatial measurements of the tunnel interior. This allowed the inspection team to gather information about tunnel geometry, internal alignment, sediment accumulation and structural variations along the tunnel length.
The combination of imaging sonar for navigation and profiling sonar for measurement enabled the ROV to safely progress through the tunnel while simultaneously recording inspection data for post-mission review.

Tunnel Inspection Execution and Data Capture
Using the sonar‑based navigation, the Boxfish ROV successfully travelled the full length of the tunnel. Throughout the inspection, the pilot was able to maintain controlled movement and vehicle stability with sonar data providing sufficient situational awareness to navigate the confined environment.
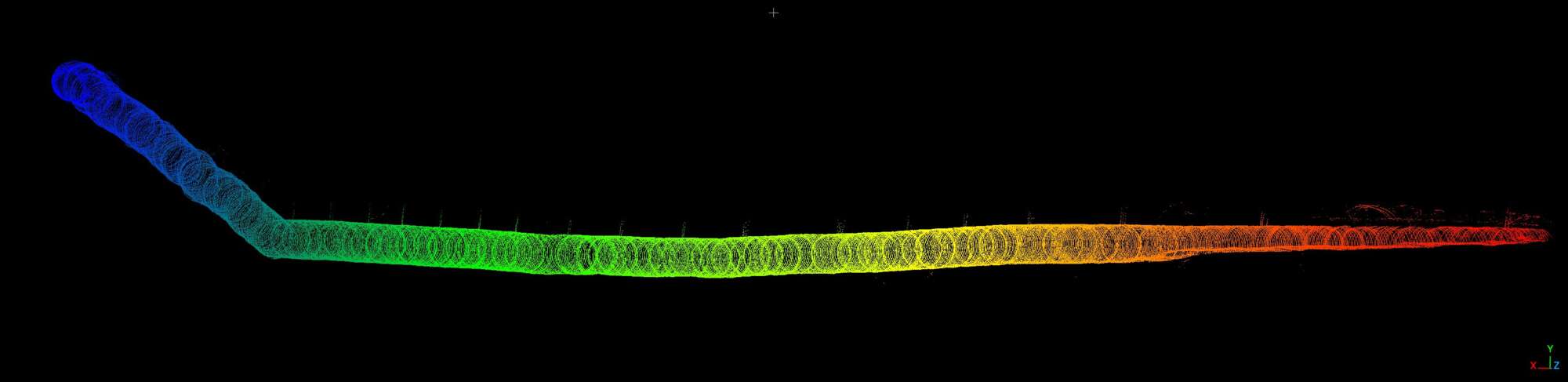
The inspection produced a complete digital record of the tunnel interior using the pipe profiling sonar. As the ROV moved through the tunnel, the sonar continuously captured acoustic cross‑sections of the tunnel. The Boxfish ROV supports a distance measurement feed that can be picked up by the profiling sonar software to enable a 3D representation of the pipe’s inner surface to be generated along the full 163-metre length. The ROVs distance measurement feed can be from either a thrust and drag based model or from a DVL.
The Boxfish ROV and Pipeline Profiler complement the multidisciplinary expertise of our team, enabling Deep Dive Division to safely capture and interpret high-quality underwater data. By combining practical underwater operations with engineering, surveying, marine technology, and environmental science, we deliver clearer asset insights, more accurate reporting, and stronger outcomes for our clients.
Deep Dive Division Team
Post‑inspection Data Processing
After the inspection, the recorded sonar data was processed into a full three‑dimensional representation of the tunnel interior by combining the sonar data with distance and data from the Boxfish ROV’s onboard sensors . This transformation converts the series of individual sonar profiles, distance measurements, heading and depth data into a continuous digital model that accurately reflects both tunnel geometry internal dimensions. The resulting dataset provided an intuitive view of the tunnel structure and could be examined in detail after the operation.
The model shows a section of the tunnel had slumped and another section had partially filled with sediment.

-
 Deep Dive Division team preparing for inspection on site. Courtesy of Deep Dive Division.
Deep Dive Division team preparing for inspection on site. Courtesy of Deep Dive Division.
-
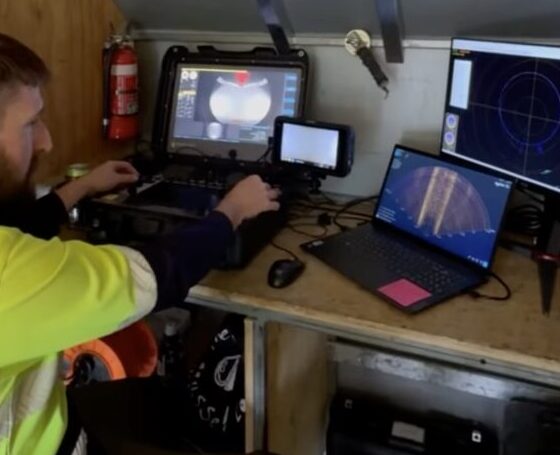 Dive Dive Division Operations Manager driving the ROV though the tunnel using sonar navigation. Courtesy of Deep Dive Division
Dive Dive Division Operations Manager driving the ROV though the tunnel using sonar navigation. Courtesy of Deep Dive Division
-
 Boxfish ROV Inside the Tunnel During Inspection. Courtesy of Deep Dive Division
Boxfish ROV Inside the Tunnel During Inspection. Courtesy of Deep Dive Division
-
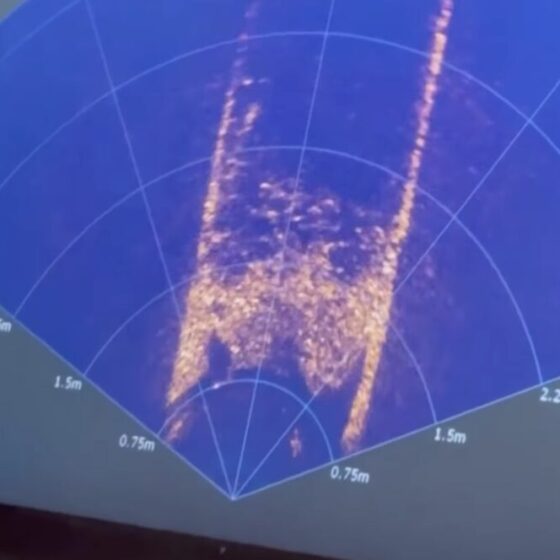 Sonar image of the tunnel. Courtesy of Deep Dive Division
Sonar image of the tunnel. Courtesy of Deep Dive Division
-
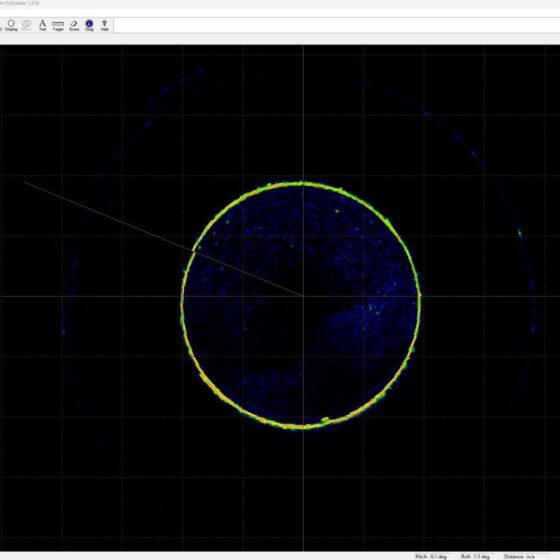 Pipe profiler cross-section of the tunnel interior. Courtesy of Deep Dive Division.
Pipe profiler cross-section of the tunnel interior. Courtesy of Deep Dive Division.