Extend Your Underwater Vision
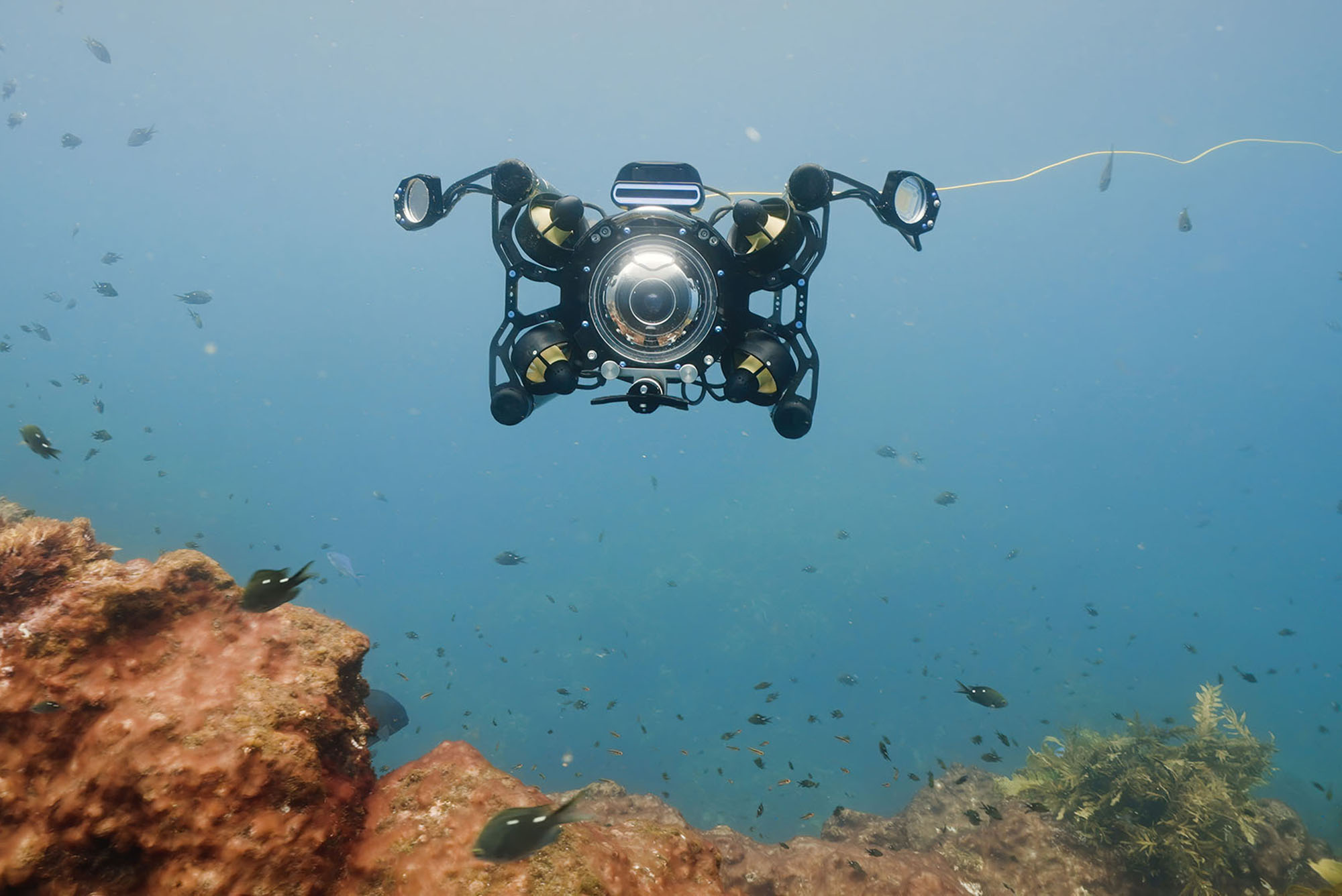
Integrate Multibeam Imaging Sonar with your Boxfish ROV to enhance navigation in poor visibility, improve target identification and conduct underwater surveys.
What is Sonar, and What is it Used For?
SONAR is short for SOund NAvigation and Ranging. It uses sound waves to locate and visualise landscapes and objects in their surroundings. Sonar is particularly effective underwater because sound travels further in this environment.
Underwater sonars fall into two main types – passive and active. Passive sonar detects or listens to noise from marine objects, like ships and marine animals. Research and military vessels primarily use passive sonar to listen to the ocean.
Active sonar involves an acoustic signal and reflection or echo. The device sends a sound wave from a vehicle’s position and determines how far away an object is based on the time and strength of the returning echo.
Some types of active sonar, like multibeam imaging, can also help identify an object’s shape and composition because certain materials reflect sound more than others.
What is Multibeam Imaging Sonar?
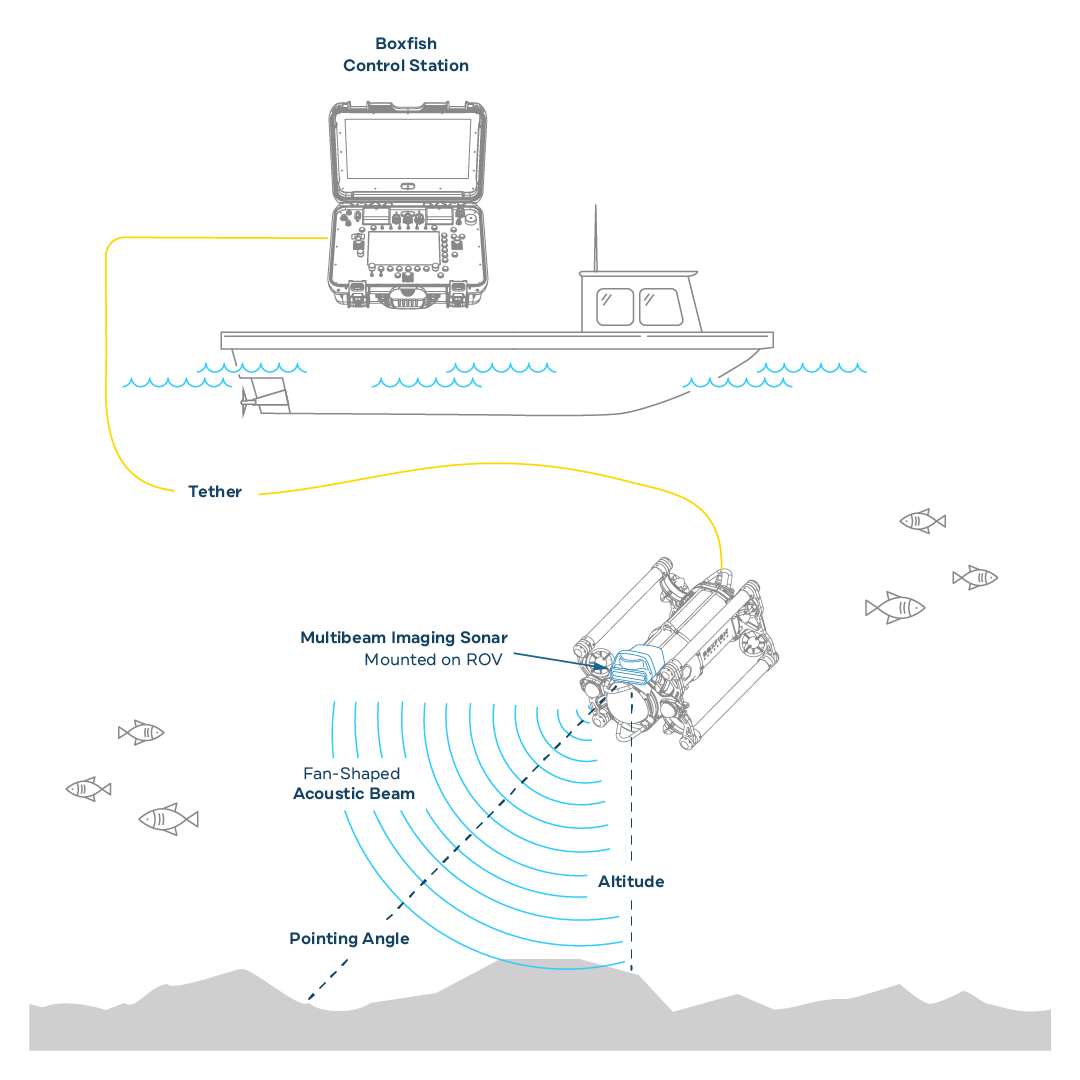
Multibeam imaging is an active sonar that creates images of underwater objects and environments. The transmitter sends hundreds of sound pulses (pings) out into the water in a fan shape. These acoustic waves are reflected by objects in their path and processed by the receiver. The device then calculates the relative distance of an object using the speed of sound and time elapsed between ping and echo.

How is ROV Multibeam Sonar Imaging Used?
A high-quality underwater vision system is essential for ROVs, allowing close-up inspection and excellent surround visibility for navigation. However, it can still be challenging to locate and identify objects underwater when the visual cues are distorted, images appear flat, and the water is murky.
Active sonar systems are integrated with ROV platforms to assist vehicle navigation in murky water and provide object imaging. Imaging sonar acts as a viewing tool helping ROV operators to distinguish the size, shape, and material characteristics of a target. Scientists also use the technology for ocean exploration and research to survey the seafloor.

Underwater Surveys
Scientific researchers use active underwater sonars to map the seabed and collect data on submerged objects and hazards, such as nets and shipwrecks. Real-time ROV video and imagery help support underwater surveys and research.
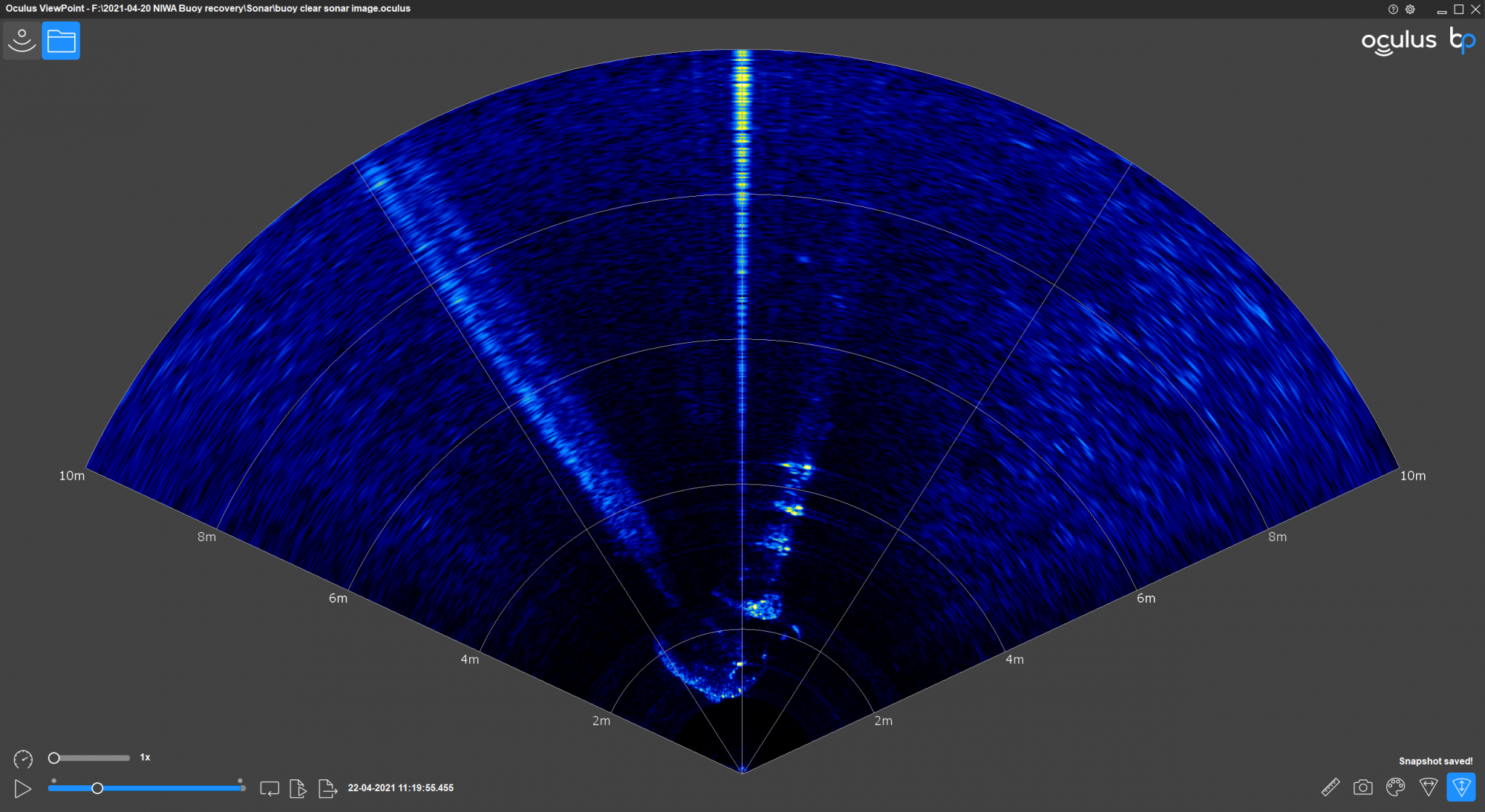
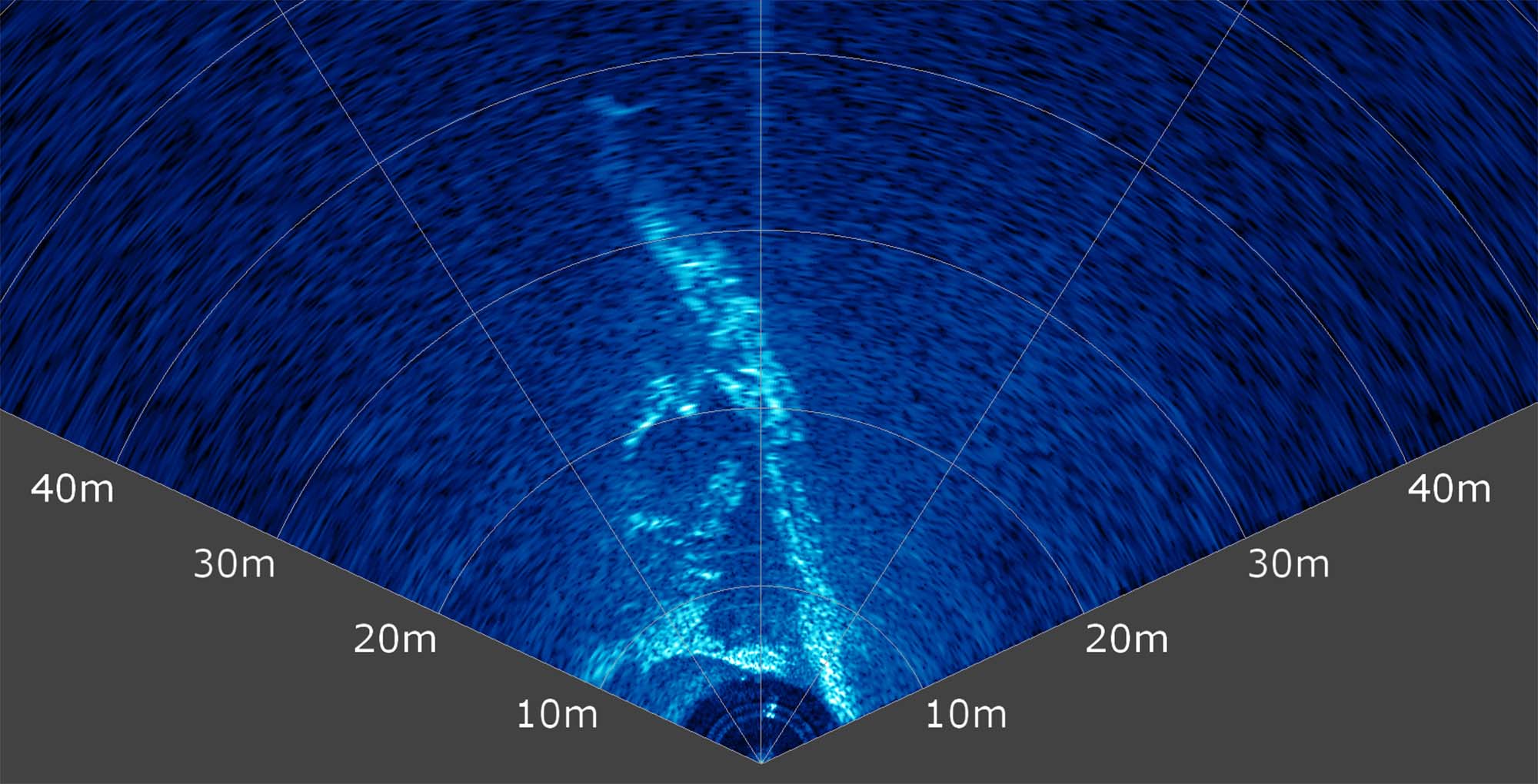
Imaging sonars allow the distance to objects and their size to be easily measured from the sonar display.
ROV Navigation and Asset Inspection
ROV navigation can be impacted by low visibility underwater. An ROV-mounted imaging sonar helps provide position information and improves situational awareness when navigating turbid conditions.
Sonar also enhances asset inspection capabilities allowing ROV operators to detect damage or anomalies. Inspectors may use sonar to image large structures, such as bridge pilings, comparing changes in surveys over time to identify defects.
Target Identification
Scanning sonar enables an ROV operator on the surface to explore, locate and identify objects safely. Therefore, ROV operators may use the technology for target identification during search and recovery missions. Particularly when using scuba divers is difficult or dangerous because of low visibility.
By holding stationery and slowly turning the ROV, the pilot can scan the surrounding area and identify potential targets. Including objects at a distance from the vehicle. When the location of an object is confirmed, it can be retrieved by the ROV or a diver.
How Does Multibeam Sonar Imaging Work?
Acoustic Beam Pattern
Scanning sonars, like multibeam imaging sonar, emit an acoustic beam with a wide vertical height and narrow horizontal width that illuminates the surrounding area with thin slices of acoustic energy. The device rotates the transducer mechanically, scanning in an arc to capture hundreds of visual cross-sections.
The sonar device then composites this data to display a single visual image of the surroundings. The display converts an object’s relative distance, and location to pixels with things further away mapped higher on the vertical axis.
Target Reflectivity
The multibeam sonar display also visually represents the loudness of the returned ping. The level of brightness corresponds to the strength of the echo. Darker colours indicate a weak echo, while brighter colours mean the sensor received a strong signal.
This visual data helps ROV operators interpret the surrounding environment. Because the amount of acoustic energy reflected or absorbed by a target object depends upon its material density.
Materials with a similar density to water or that absorb sound waves, like silt and plants, have a weaker echo. Underwater objects made of solid and reflective materials, like rock or metal, return a robust acoustic signal.
Object Visibility, Scanning Angle and Range
Scanning sonars cannot distinguish between objects at the same vertical arrival angle or slant range. As a result, vertically stacked objects at the same range from the transducer will display a single result. Furthermore, things outside the acoustic beam pattern or that fall within the acoustic shadow of an object are not illuminated on the imaging display.
Therefore, when searching for objects on the seabed or scanning a ship’s hull, it is necessary to maintain an optimal scanning angle and altitude or distance from the target area. Boxfish ROVs have true six degrees of freedom of movement, meaning they can travel and orient in any direction. This feature allows ROV operators to pitch the vehicle at a steep or shallow angle to achieve optimal imaging.
Using Multibeam Sonar Imaging with Your Boxfish ROV
ROV stability and precision control are essential to acquiring clean imaging. A Boxfish ROV is highly manoeuvrable, automatically stabilised and can orient in any direction. This feature makes a Boxfish ROV equipped with multibeam imaging sonar ideal for bathymetric surveys, asset inspection, research, and search and recovery tasks.
You may add this accessory to any Boxfish remotely operated vehicles – Boxfish Alpha, Boxfish ROV or Boxfish Luna.