New Zealand’s National Institute of Water and Atmospheric Research (NIWA) recently used the Boxfish Remotely Operated Vehicle (ROV) to search for and recover a scientific monitoring buoy worth NZD400,000 that disappeared from its mooring off the coast of Wellington.
The buoy, which was programmed to send real-time data from its location about ocean and weather conditions, stopped sending data and was confirmed missing in March. The reason for its disappearance was unknown, and the research team at NIWA assumed it had sunk after being hit by a large vessel.
Using underwater search tools including an echosounder and drop cam, the NIWA team managed to locate a lump on the ocean floor near the buoy’s initial mooring at a depth of 45 metres. However, more sophisticated underwater search and recovery tools would be needed to positively identify the buoy and facilitate its recovery to the surface.
The depth of the buoy ruled out the use of divers, so in late April the Boxfish team was called on to join the search and recovery mission.
The Boxfish team plan was to use the Boxfish ROV, equipped with its standard 4K camera as well as additional USBL and Sonar accessories, to locate the buoy, assess its condition and identify a suitable place to attach a recovery cable. The team would then use the ROV to attach the cable so the buoy could be hauled onto the recovery boat.
Underwater Search
Those unfamiliar with ocean conditions could be forgiven for thinking that the boat could simply travel to the buoy’s GPS coordinates and send the ROV straight down to find it.
However, real life is not always so simple! On the day of the search and recovery mission, there was a strong (1 knot) current. After anchoring the boat and accounting for drift, the search and recovery boat sat some distance away from the buoy’s suspected location.
To speed up the underwater search for the buoy, the Boxfish team had attached two additional pieces of equipment to the ROV: a Blueprint Subsea USBL beacon and a Blueprint Subsea Sonar device.
USBL is a local positioning system that shows the location of the ROV relative to the boat. The local beacon in this case was fitted on a pole below the anchored NIWA ship, and the remote beacon was attached to the ROV.
The team was able to use the GPS coordinates of the buoy’s suspected location to deploy the ROV in the correct direction. Then, using the USBL application on the Boxfish surface Control Station, the team could see a visual representation of the position of the ROV as it moved towards the buoy, relative to the fixed position of the ship.
Although visibility on the day was good at around 8 metres, the USBL and ROV camera alone would not provide the most efficient way to search for the buoy. So the team used an underwater survey tool – the sonar accessory – to scan for the buoy on the sea floor.
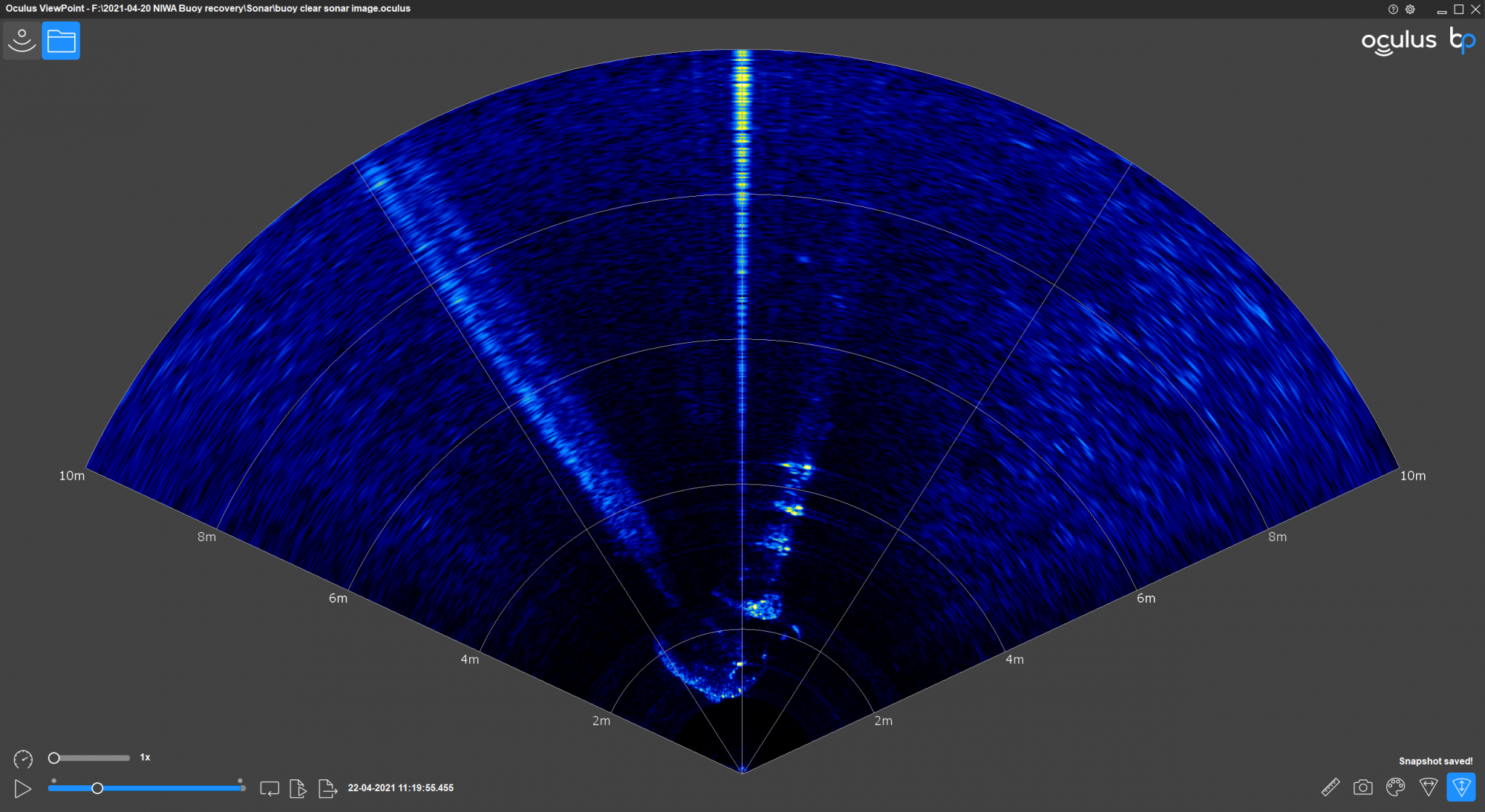
The Blueprint Subsea Sonar is a multibeam sonar that can operate at different frequencies, depending on the resolution or field of view required. Higher frequencies result in much higher resolution images, however, the beam has a narrower field of view. Not needing a high-resolution image in this case, the team used a lower frequency which yielded a 40m wide beam, allowing them to quickly search for the buoy over a much wider area.
On the sonar visualisation software, the team found a line on the sea floor and manoeuvred the ROV towards it. It was the buoy’s chain! Following the chain, the buoy emerged in view of the ROV’s camera shortly after.
The camera feed from the ROV, viewable live at the surface via the ROV’s Control Station, revealed detailed video of the buoy lying on the sea floor. The NIWA team were excited that the buoy was intact and in good condition, and a suitable place was identified for attaching the recovery cable.
Underwater Recovery
Once the buoy’s location was confirmed, it was an easy task for the ROV to find it again using USBL – this time with a recovery cable attached.
The Boxfish team had devised a mechanism attached to the ROV that would essentially “thread the needle”. Despite the 1 knot current, the Boxfish ROV’s active stablisation feature allowed the team to make the precise movements needed to push a cable (with a weight attached) through the hole. The team then manoeuvred the ROV to the opposite side of the hole to capture the cable and bring it to the surface.
Once the recovery cable was attached, the NIWA team was able to bring the buoy back to the surface and onto the ship.
Boxfish ROV and Accessories – Essential Tools for Underwater Search and Recovery
The Boxfish ROV is a safe, easy and cost-effective option for the timely recovery of valuable underwater assets, such as the scientific buoy deployed by the GWRC-DOC-NIWA partnership.
When an object is lost underwater, the unpredictable environment means it’s critical to launch an underwater search and recovery mission as quickly as possible.
It’s not always possible, or practical, to use commercial divers for underwater search and recovery operations due to safety considerations, depth limits and decompression time.
Boxfish ROVs can be deployed in as little as ten minutes, by a team of just two, and descend to depths of up to 1000m. Additional integrated sonar and USBL accessories allow the ROV to quickly perform underwater search missions and make repeated dives with a high degree of precision.
Once the item is located, the Boxfish ROV’s remotely-controlled camera streams live 4K video to the surface for viewing on a 17″ UHD screen, giving detailed coverage of what is happening beneath the surface.
The Boxfish ROV’s superior stability and control in a current makes it an ideal tool for underwater recovery tasks. Additional grabber accessories are available to facilitate a range of recovery operations.

What specific challenges are you facing in your underwater recovery project?
We help you figure out what you need, just drop us your message here and we will get back to you in 24 hours!
-
 Boxfish ROV with Blueprint Subsea USBL and Multibeam Sonar on its search and recovery mission. Photo courtesy of Boxfish Research.
Boxfish ROV with Blueprint Subsea USBL and Multibeam Sonar on its search and recovery mission. Photo courtesy of Boxfish Research.
-
 Sonar image of the scientific buoy during recovery mission, the multibeam sonar is mounted on the Boxfish ROV. Photo courtesy of Boxfish Research.
Sonar image of the scientific buoy during recovery mission, the multibeam sonar is mounted on the Boxfish ROV. Photo courtesy of Boxfish Research.
-
 Boxfish Console allows to monitor the underwater mission from 4K 17 inch monitor in real-time. Photo courtesy of Boxfish Research.
Boxfish Console allows to monitor the underwater mission from 4K 17 inch monitor in real-time. Photo courtesy of Boxfish Research.
-
 The scientific buoy returned to the surface and onto the ship using Boxfish ROV. Photo courtesy of Boxfish Research.
The scientific buoy returned to the surface and onto the ship using Boxfish ROV. Photo courtesy of Boxfish Research.