




Monitor ROV Location
Add the USBL (ultra short baseline) underwater positioning system to your Boxfish ROV (remotely operated vehicle) to control and track its location and course during a mission.
How does the Boxfish ROV USBL Positioning Work?
The device uses triangulation to pinpoint the position of the ROV. The positioning system consists of a USBL transponder and a beacon. You can mount or suspend the transponder from your vessel. It communicates wirelessly with the beacon on the Boxfish ROV using high-frequency sound waves.
The transponder periodically transmits commands to the beacon, which the beacon will reply to immediately. The transponder can then measure the response time and returning signal direction. This data allows the system to calculate the ROV’s 3D position relative to the boat.
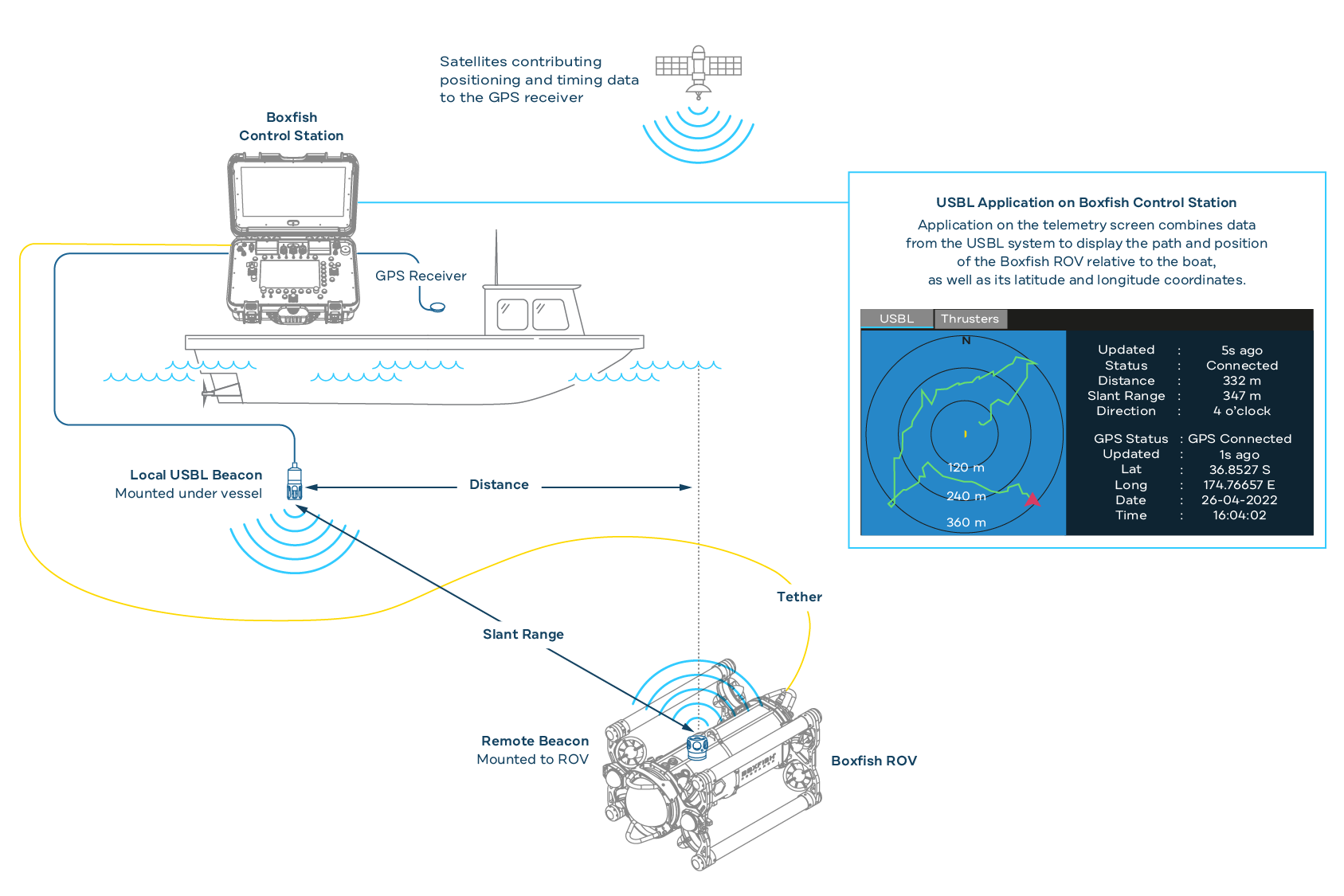
The USBL we use also has an Integrated AHRS (Attitude and Heading Reference System). This system helps compensate for errors caused by the boat pitching, rolling and turning.
How do I know the global coordinates of the Boxfish ROV?
You can attach a GPS module (inclusive) to the vessel positioning system to get the Boxfish ROV’s global coordinates. The software combines the transponder and GPS module data to calculate and display the absolute global position of the underwater vehicle.
You can install the software on the Boxfish Control Station or a separate navigation laptop. Thus, allowing control of the positioning system and providing real-time display features to monitor the mission.
Custom Underwater Solutions
Can’t find what you need to accomplish work underwater? If we don’t already build it or can’t source it, we can custom engineer a solution for you.
What is the accuracy for Boxfish positioning system?
USBL positioning is utilised across a range of water depths, from shallow to deep waters. The accuracy of USBL positioning is directly proportional to the distance, for preferred USBL systems integrated with Boxfish ROVs are listed in the table below.
| Range Resolution: | ±0.1m (dependant on provided VOS accuracy) |
| Angular Resolution: | typically 2% of Acoustic Range (~±1°) |
| Velocity of Sound (VOS) Range: | 1300ms-1 to 1700ms-1 (can auto-compute from water temp & depth) |
Want more information about ROV positioning?
Contact us today to learn more about our undewrater positioning system and ROV technology,
just drop us your message here, and we will get back to you in 24 hours!