Hovering Autonomous Underwater Vehicles (AUVs) are revolutionizing underwater exploration and research. Unlike traditional Remotely Operated Vehicles (ROVs) that rely on tethers for power and communication, hovering AUVs operate independently, using advanced technologies to navigate and communicate underwater.
One of the key technologies enabling tetherless operation is the use of acoustic signals. Acoustic communication is essential for underwater vehicles because radio waves, which are commonly used for communication on land, do not travel well through water. Acoustic signals, on the other hand, can travel long distances underwater, making them ideal for communication and navigation.
Here we delve into the sophisticated navigation systems that empower our AUVs to operate autonomously in the challenging underwater environment.
Challenges of Underwater Navigation
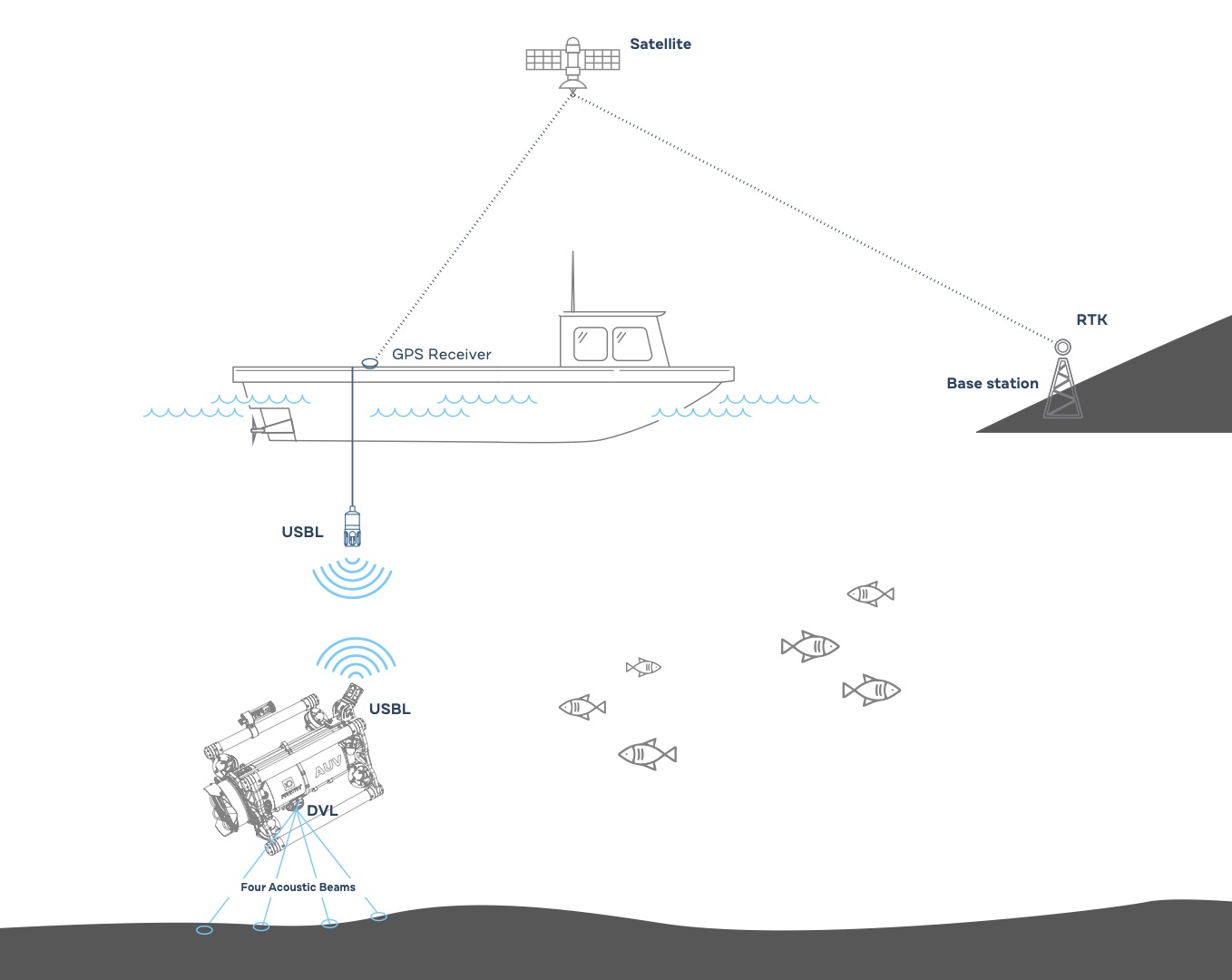
Underwater navigation is inherently complex due to the absence of GPS signals and the limited visibility. Our AUVs rely on a combination of dead reckoning and acoustic positioning to navigate. This is supplemented by stereo cameras and, optionally, imaging sonar. Dead reckoning involves using a Doppler Velocity Log (DVL), and speed and heading measurements along with current sensing. For acoustic positioning, we utilize Ultra-Short Baseline (USBL) systems, which are compact and easy to deploy. The USBL system also supports bi-directional communication for monitoring and control.
Schematic principle of Boxfish AUV navigation system.
Primary Navigation Instruments
USBL: This system allows our AUVs to determine their position accurately by measuring the round-trip return time of acoustic signals sent to and from beacons. Despite its accuracy, USBL can face challenges such as multipath problems and signal propagation issues due to environmental factors.
IMU: Our IMU measures acceleration and angular velocity using accelerometers and gyroscopes, and has a magnetometer to provide compass heading.
DVL: DVL measures movement over the seabed using acoustic transducers. It offers precise velocity measurements and, when combined with the USBL, can significantly reduce navigation inaccuracies and greatly improve precision. In addition, the DVL provides altitude measurements and in collision avoidance.
Depth Sensor: A high-precision depth sensor is employed to measure depth.
Surface GNSS/GPS: The surface GNSS provides absolute positioning data, which is transmitted to the AUV acoustically, ensuring the vehicle knows its exact location. NRTK support provides a precise reference position, transmitted over the USBL to the vehicle.
Sensor Fusion and Data Integration
To achieve precise and accurate navigation, we employ sensor fusion techniques. By combining data from USBL, IMU, DVL, and thrust dead reckoning we can mitigate the limitations of individual sensors.
Additional Navigation Instruments
Our AUVs are equipped with a range of supplementary instruments, including multibeam imaging sonar, stereo cameras, depth sensors, and magnetometers. These tools aid in object detection, collision avoidance, and maintaining accurate positioning.
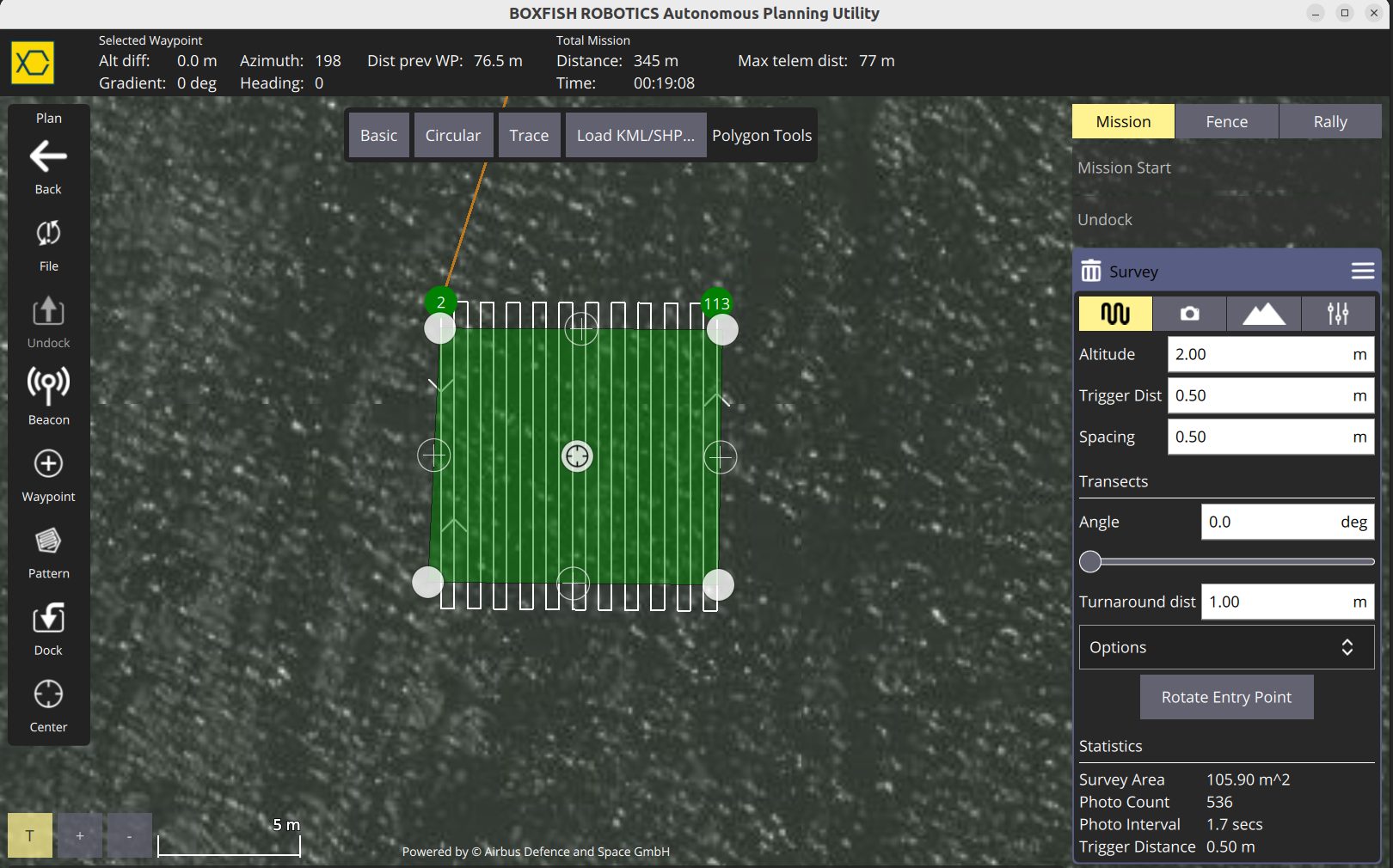
Mission Planning with Boxfish SafePath Planner
Our mission planning software, Boxfish SafePath Planner, offers a user-friendly interface for planning and executing missions. Users can set waypoints, adjust sensor settings, and define mission parameters with ease. The software ensures seamless integration of all navigation instruments, providing a robust and reliable solution for underwater exploration.
Advantages of Tetherless Hovering AUVs
The tetherless operation of hovering AUVs offers several advantages over traditional tethered ROVs. Firstly, it eliminates the risk of tether entanglement, which can be a significant hazard in complex underwater environments. Secondly, it allows the AUV to operate in deeper waters and more challenging conditions, where tethers might be impractical or unsafe.
Additionally, tetherless AUVs can cover larger areas and perform longer missions without the limitations imposed by a tether. This makes them ideal for tasks such as mapping the seafloor, monitoring marine habitats, and conducting environmental assessments.
Applications of Hovering AUVs
Hovering AUVs are used in a wide range of applications, from scientific research to commercial and military operations. In marine science, they are employed to study coral reefs, track marine life, and monitor water quality. Their ability to hover and maintain a stable position makes them particularly useful for tasks that require precise measurements and detailed observations.
Hovering AUVs, particularly those with pitch control, excel in the collection of images for photogrammetry. They can navigate easily around complex reef structures and by using multiple cameras and sonar can avoid sensitive corals and avoid entanglement.
In the commercial sector, hovering AUVs are used for underwater inspections of infrastructure such as pipelines, cables, and offshore platforms. Their tetherless operation allows them to navigate around obstacles and reach areas that would be difficult or impossible to access with tethered ROVs.
Hovering AUVs represent a significant advancement in underwater technology, offering the ability to operate independently without the constraints of a tether. By utilizing acoustic signals for communication and navigation, these vehicles can perform complex missions in challenging underwater environments. As technology continues to evolve, hovering AUVs will play an increasingly important role in exploring and understanding our oceans.
Boxfish Robotics is at the forefront of underwater navigation technology. Our comprehensive approach, combining advanced sensors, data fusion, and intuitive mission planning, ensures our AUVs can navigate the depths with unparalleled precision and reliability. Whether for scientific research, industrial inspection, or environmental monitoring, our AUVs are equipped to capture all the data required.