




Enhance ROV Navigation
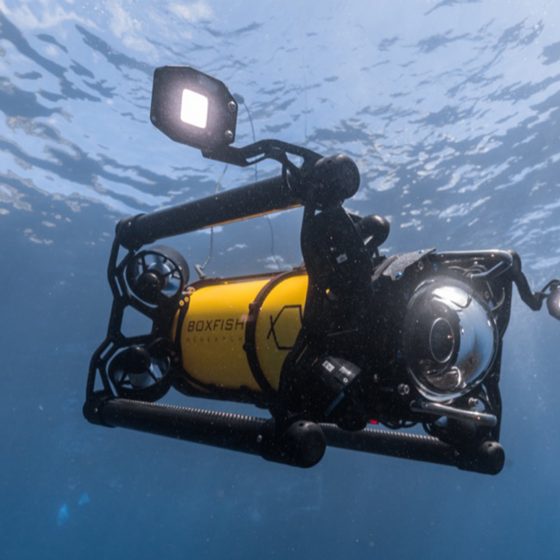
Add the DVL package to any of our underwater vehicles to enhance ROV navigation, vehicle stability and control during underwater operations, asset inspections, surveys and filming.
What is a Doppler Velocity Log?
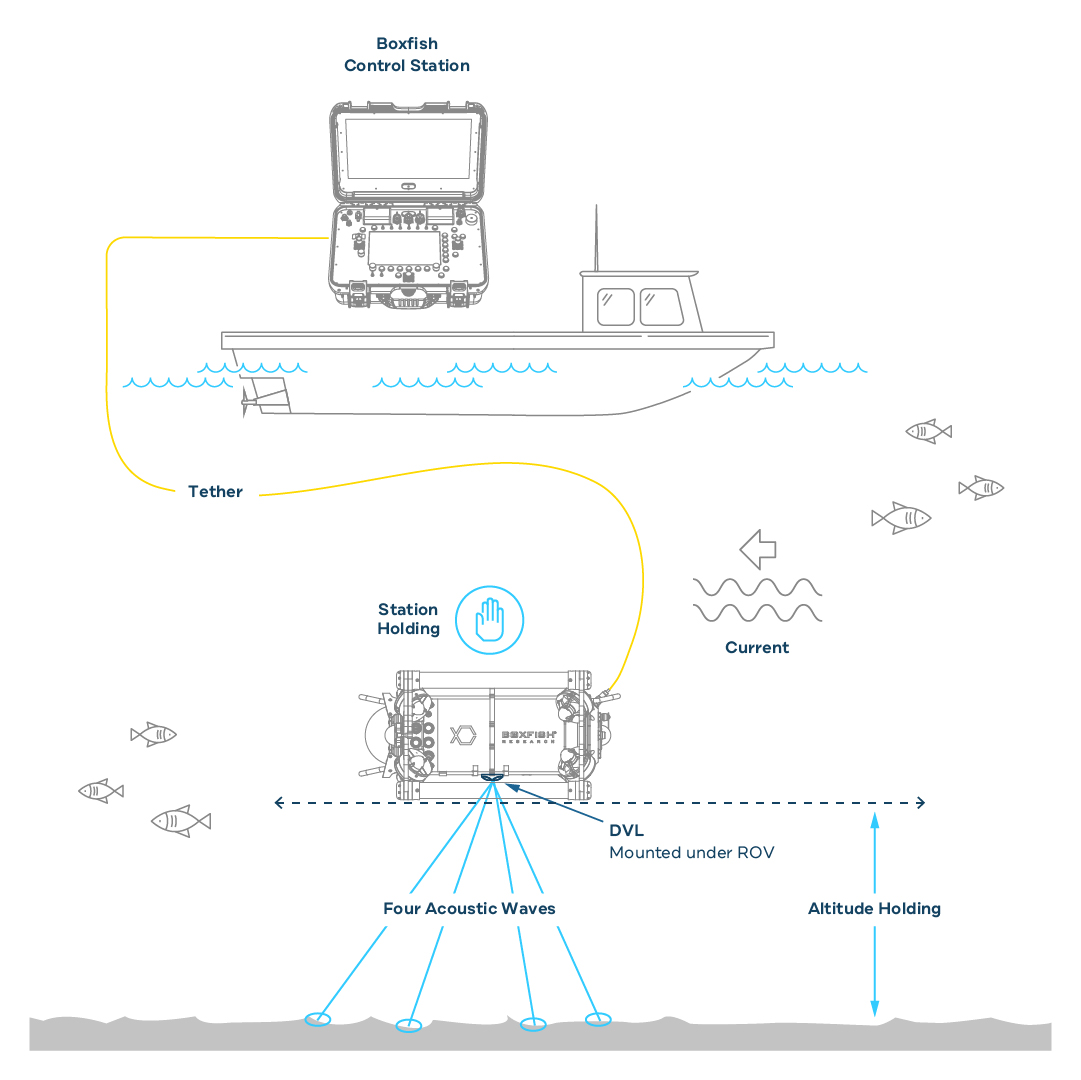
A Doppler Velocity Log (DVL) is an acoustic sensor mounted to the bottom of a remotely operated vehicle (ROV). The device uses sound waves to estimate the speed of the underwater vehicle relative to the sea bottom.
Why Use a DVL With Your ROV?
High-precision positioning and station-holding are critical while performing inspection and operation tasks with underwater robots. Using a DVL navigation sensor helps ROV operators position an underwater vehicle precisely and keep it in place even when there is current. When using additional equipment, such as a grabber or manipulator, precise ROV control is essential.
Additionally, a Doppler Velocity Log improves terrain following. Helping ROV pilots maintain an optimal altitude above the seafloor when using imaging sonar or during underwater surveys. Combined with advanced Boxfish ROV systems, the velocity feedback provided by a DVL enhances underwater ROV navigation, vehicle stability and control.
You may add the DVL ROV accessory to any of our Boxfish ROVs – Boxfish Alpha, Boxfish ROV or Boxfish Luna or hovering AUVs – Boxfish AUV or ARV-i.
How an DVL Works to Enhance ROV Navigation
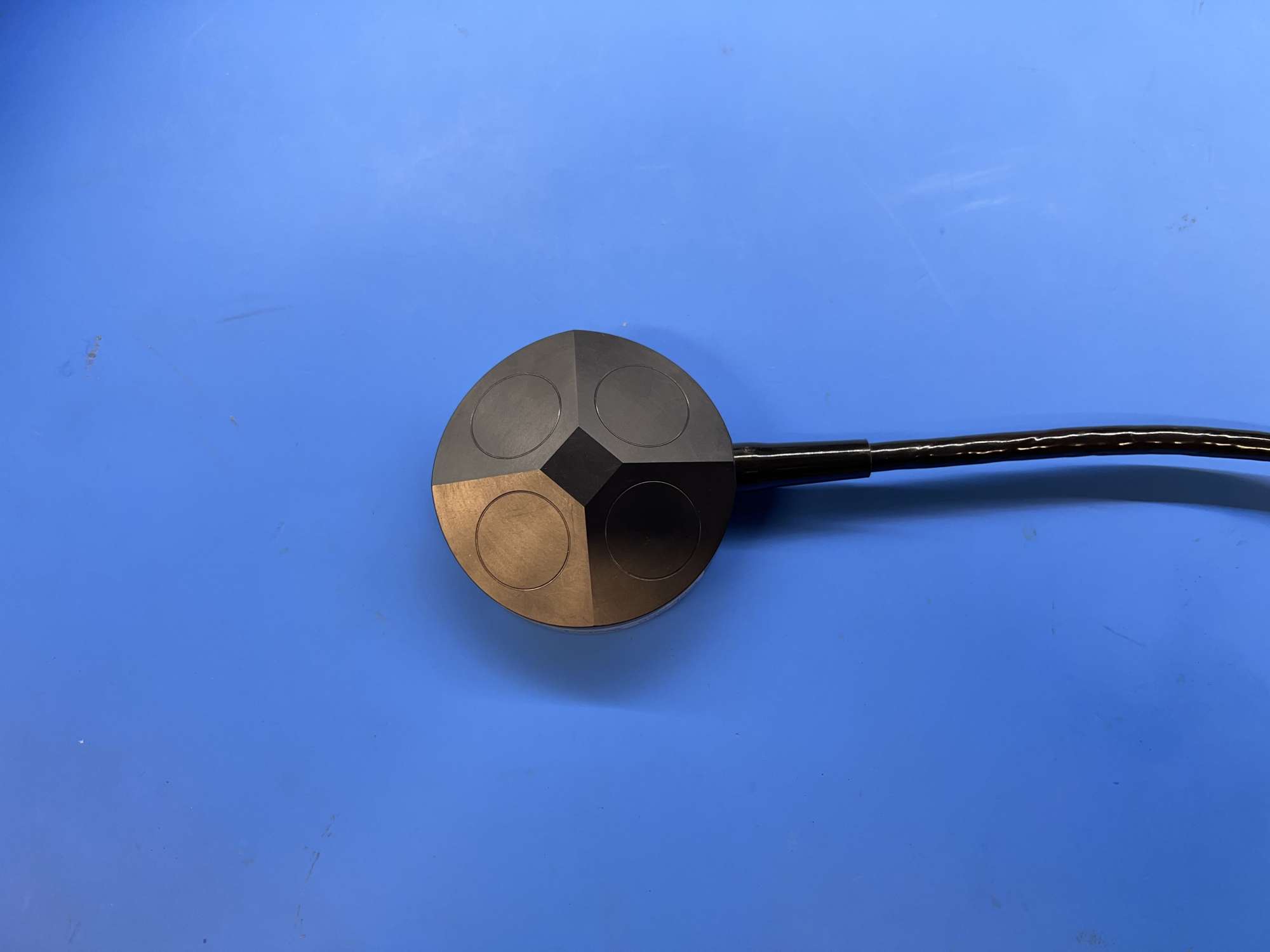
The Doppler Velocity Log emits a narrow beam acoustic wave from each of its four transducers. The transducers are each angled downwards in different directions.
The acoustic waves bounce off the sea bottom returning echoes. These rebounding waves will change in frequency when the DVL is in motion. The DVL computer measures this difference in frequency (Doppler effect) to calculate vehicle velocity.
The DVL uses transducer data and the time between each sound wave to estimate the speed and direction of the ROV. In addition to the Doppler measurement, the DVL computer records the time it takes for the echo to return and AHRS/IMU data.
The return-time data enables the calculation of the distance between the transducer and the seabed (altitude).
The onboard Attitude and Heading Reference System (AHRS) / Inertial Measurement Unit (IMU) provides heading and attitude information for the vehicle. It uses data from the triaxial gyroscope, accelerometer and compass sensors to determine ROV orientation.
The estimated distance travelled, altitude and AHRS headings are processed using an advanced algorithm to compute ROV velocity. Then, the ROV’s onboard computer uses this information to control the thrusters to maintain altitude and keep the ROV in position relative to the sea bottom.

Want more information about our DVL for ROV navigation?
We’re happy to answer any questions you have, just drop us your message here
and we will get back to you in 24 hours.